

Indoor four-rotor unmanned aerial vehicle 360-degree three-dimensional obstacle avoidance system
A four-rotor UAV, obstacle avoidance technology, applied in control/adjustment system, three-dimensional position/channel control, non-electric variable control and other directions, can solve problems such as real-time requirements affecting navigation, complex distance algorithm, light effect, etc. Achieve the effect of achieving safety requirements, high safety, and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with accompanying drawing.
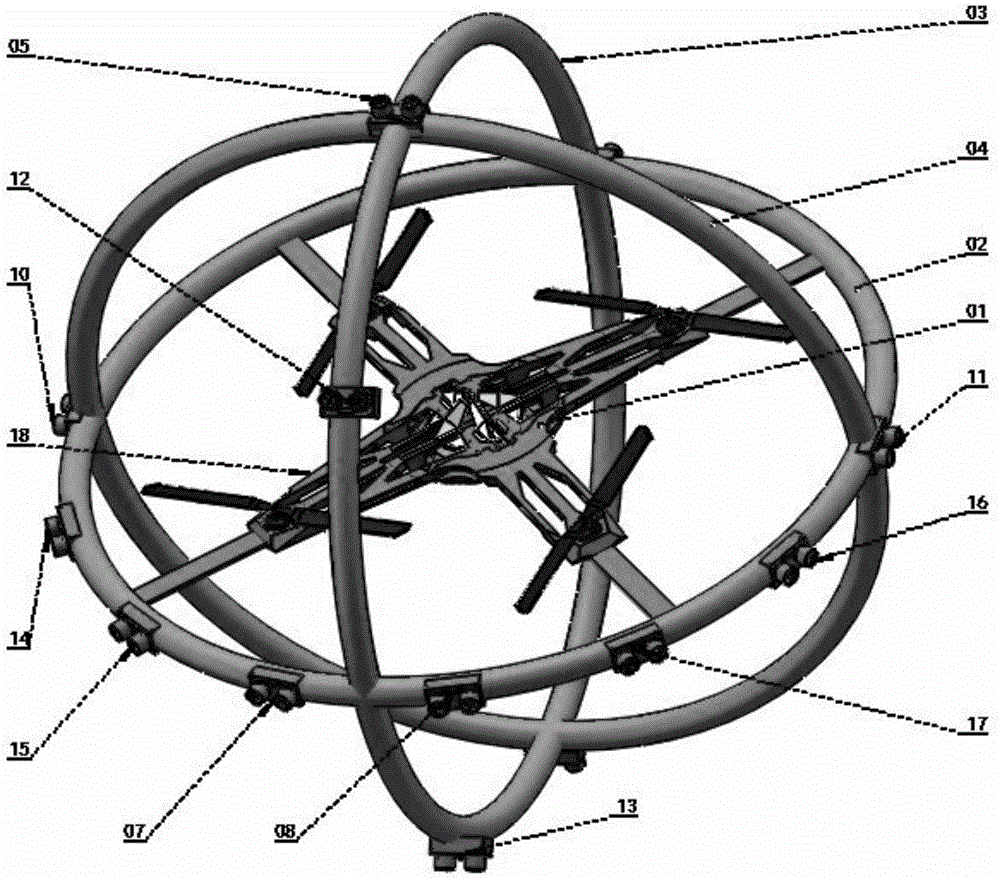
[0060] Accompanying drawing 1 is the mechanical structure diagram of 360 ° three-dimensional obstacle avoidance system. It mainly includes an STM32 controller, 13 ultrasonic sensors, three peripheral rings and a drone.
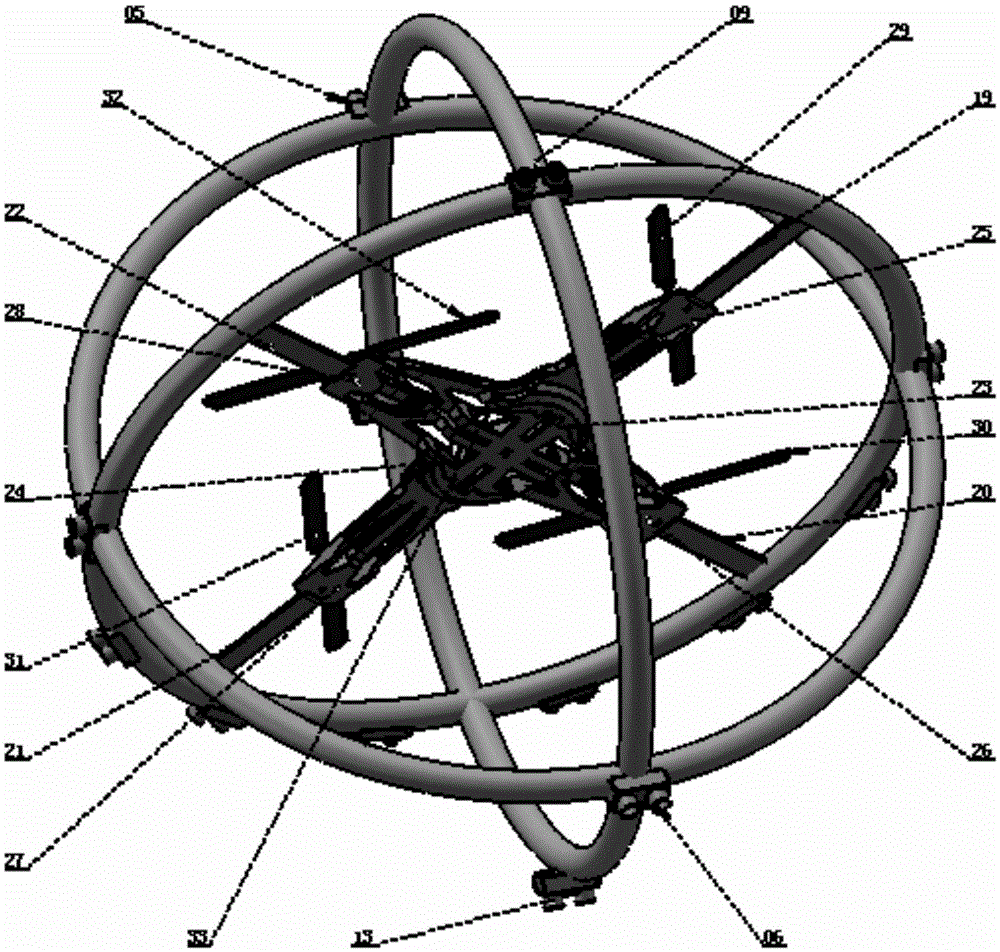
[0061] attached figure 2 It is a schematic diagram of the connection of the 360° three-dimensional obstacle avoidance system. Now we will introduce the connection method in conjunction with the quadrotor UAV:
[0062] By right rear connecting rod 19, right front connecting rod 20, left front connecting rod 21, left rear connecting rod 22, quadrotor UAV 18 and horizontal ring 02, vertical front and rear ring 03, vertical left and right ring 04 connect. as attached figure 2 As shown, the horizontal ring 02 is a complete ring, and four connecting ports are evenly distributed at intervals of 90° around the horizontal ring 02, and each connecting port has...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More