

Quad-rotor unmanned helicopter explicit prediction control method based on loft optimization
A four-rotor UAV and pigeon group optimization technology, applied in the field of aircraft control, can solve the problems of difficult application of complex trajectories and high trajectory requirements, and achieve the effect of avoiding online optimization process, overcoming high trajectory requirements, and reducing control costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The effectiveness of the design method proposed by the present invention is verified below through a specific example of UAV target detection. The computer configuration of this experiment is i7-4710MQ processor, 2.50Ghz main frequency, 4G memory, and the software is MATLAB2014a version.
[0096] The specific implementation steps of this example are as follows:
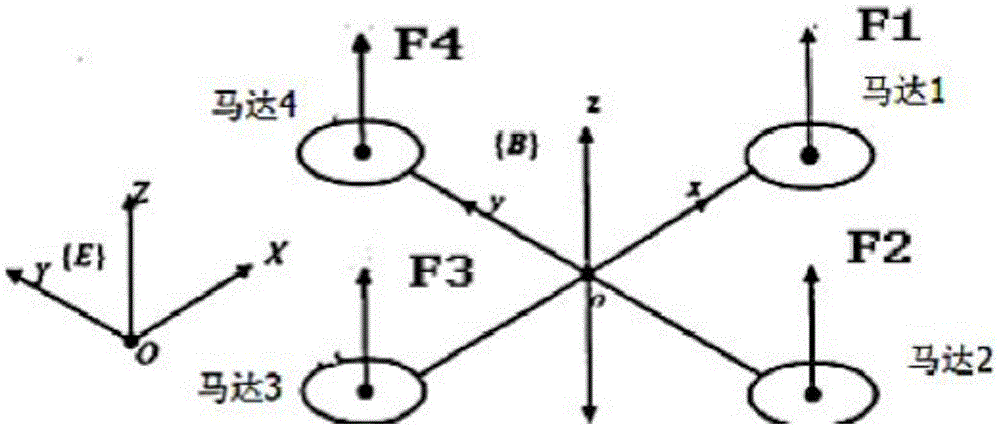
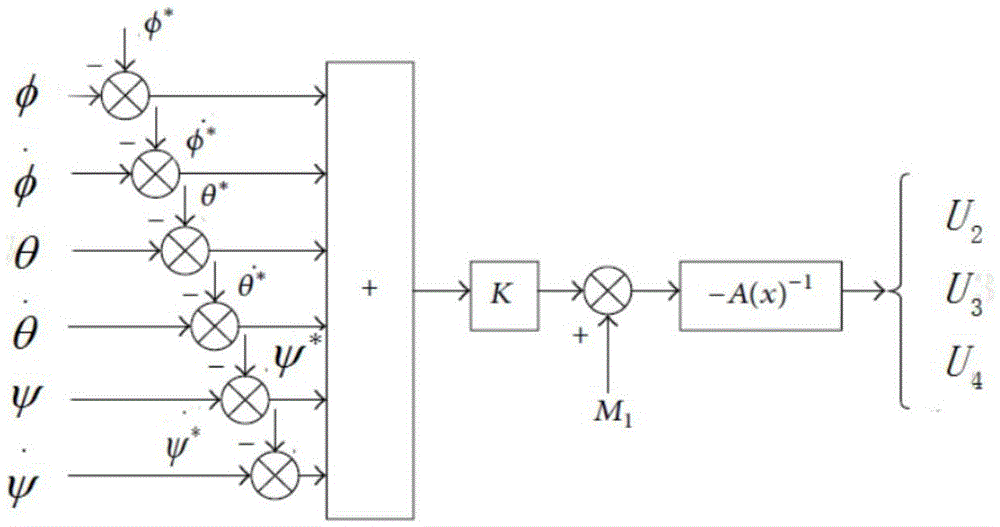
[0097] Step 1: Establish the quadrotor UAV model and control quantity, give the required trajectory, and establish a display predictive control model. A simplified diagram of the quadrotor UAV is attached figure 1 , the body coordinate system xyz and the ground coordinate system XYZ are defined in the figure, and Euler angles are defined as attached figure 2 .
[0098] where the Euler angles are defined as follows:
[0099] Yaw angle Ψ: the angle between the projection of Ox on the plane OXY and the X axis
[0100] Pitch angle θ: the angle between the projection of Oz on the plane OXZ and the Z axis
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More