

Slave side of master-slave minimally invasive vascular intervention surgical robot and controlling method of slave side
A technology of interventional surgery and robotics, which is applied in the direction of surgical robots, can solve the problems of insufficient clamping force, damaged guide wire, excessive clamping, etc., and achieve the effects of large clamping contact area, increased safety factor, and increased accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings of the description.
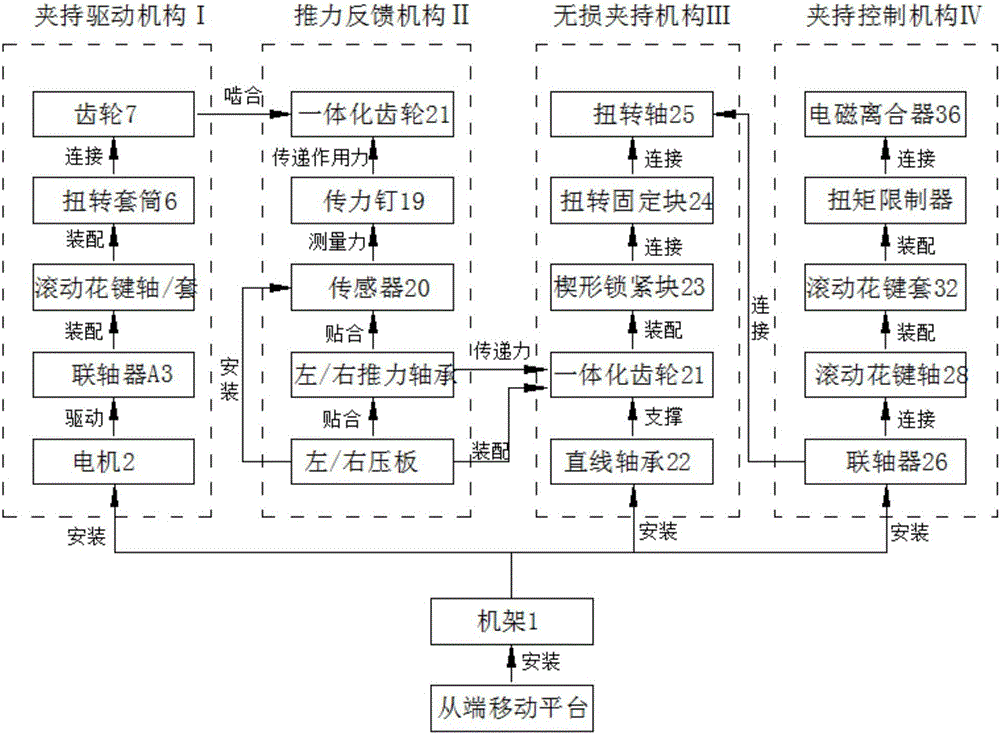
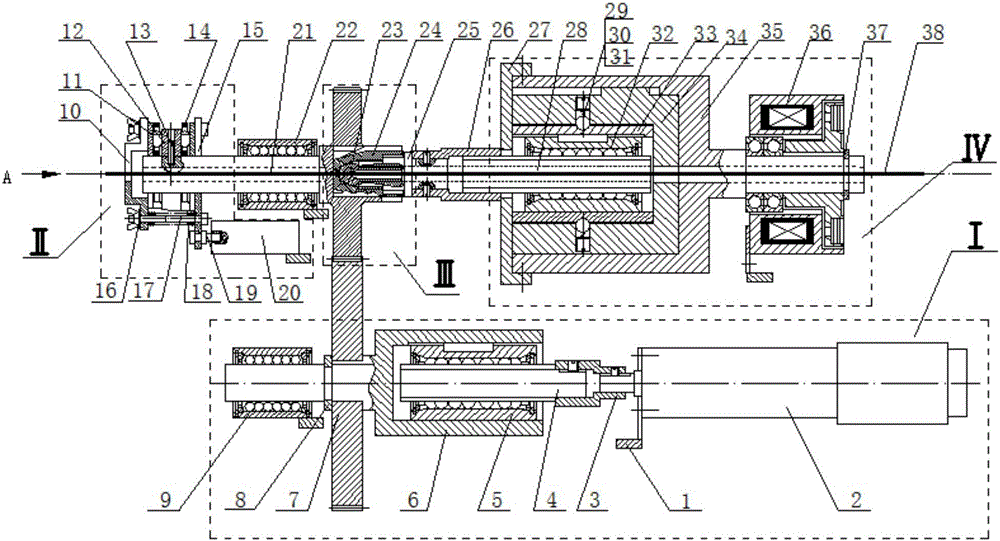
[0051] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, a slave end of a master-slave minimally invasive vascular interventional surgery robot includes a slave end control mechanism and a slave end mobile platform. The slave end mobile platform is composed of a slide motor, a nut screw pair, a slide table, and a base. The motor and the nut The screw end of the screw pair is connected, the slide table is connected with the nut end of the nut screw pair, the frame 1 of the slave end control mechanism is fixedly connected with the slide table, and the slave end control mechanism is composed of clamping drive mechanism I and thrust feedback mechanism II , Non-destructive clamping mechanism Ⅲ, clamping control mechanism Ⅳ,
[0052] The clamping drive mechanism I is composed of a motor 2, a shaft coupling A3, a rolling spline shaft A4, a r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More