

Adaptive coordination control method for intelligent vehicle steering and braking
A smart car, coordinated control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of difficulty in ensuring the real-time performance and stability of emergency obstacle avoidance, frequent steering wheel and braking operations, and the reduction of smart car The overall performance of autonomous driving and other issues, to achieve the effect of ensuring real-time and stability, eliminating dependencies, and enhancing robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
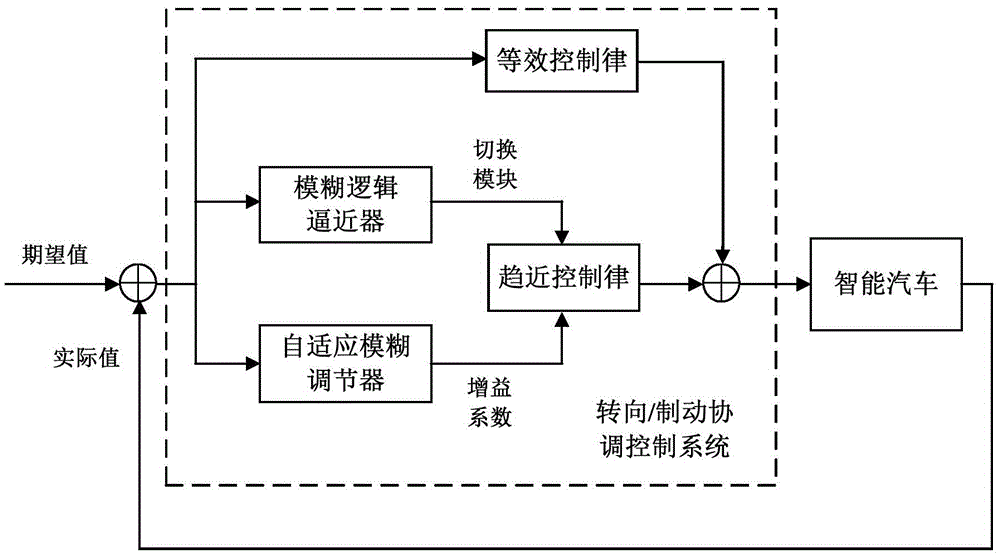
[0036] Such as figure 1 As shown, the present invention first derives the steering and braking coordinated control law composed of the equivalent control law and the approach control law based on the backstepping sliding mode control technology, and secondly approximates the switching function of the approach control law through fuzzy logic, and designs The adaptive regulator adjusts the control gain coefficient online and in real time.
[0037] The invention includes four parts: the modeling process of the steering and braking coupling dynamics model of an intelligent vehicle based on vision, the process of coordinating control design, the process of designing a control gain adaptive regulator and the process of stability analysis.
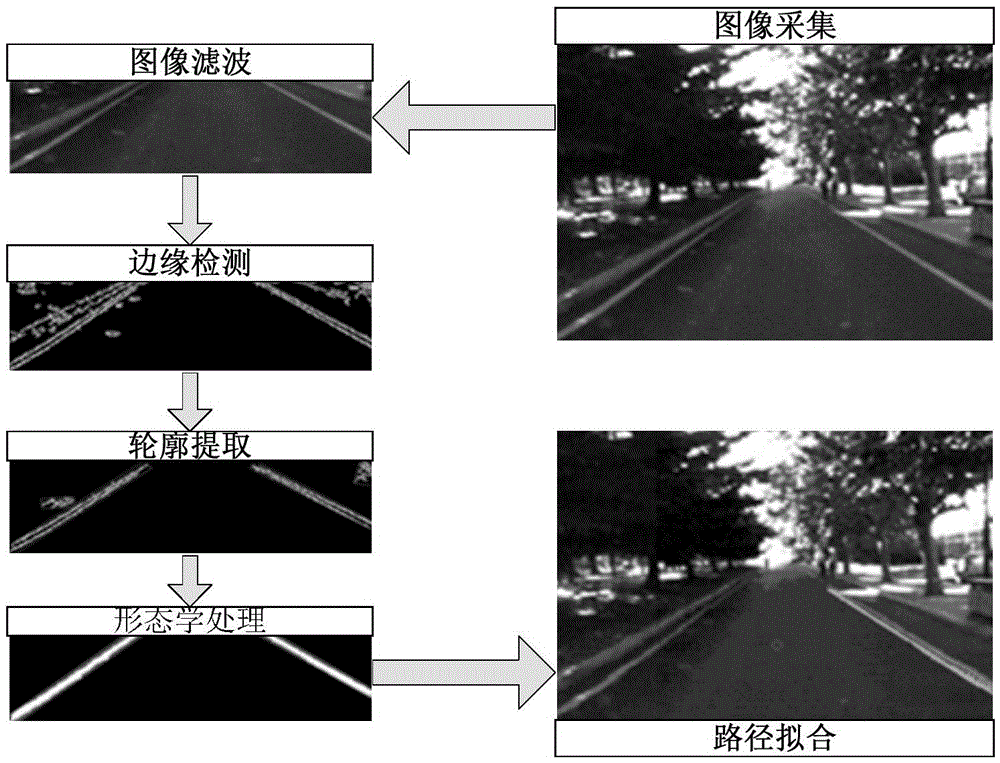
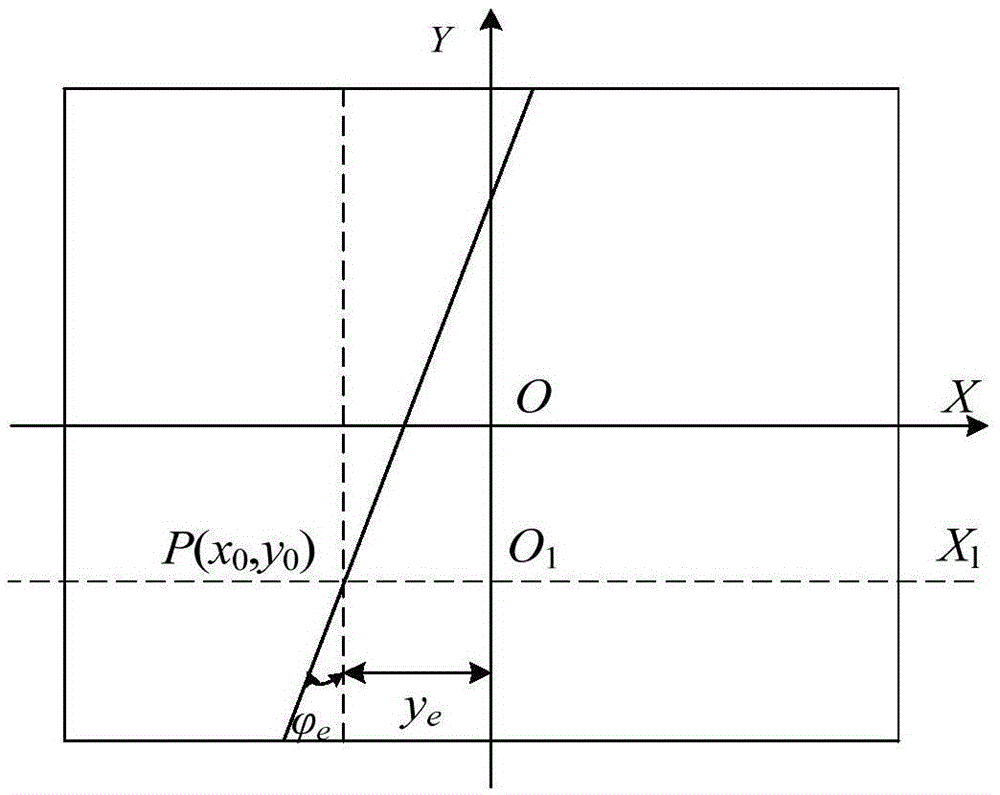
[0038] Step 1: adopt visual identification expected path, establish the intelligent car steering and braking coupling dynamics model based on vision, concrete steps include as follows
[0039] Step 1.1: Calibrate the vehicle-mounted CCD camera, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More