

Terminal clamping device for iron tower automatic overhauling climb robot
A clamping device and robot technology, applied in the field of robots, can solve the problems of unavailable and undeveloped reliable clamping of angle steel with different specifications, and achieve the effect of large clamping force, light weight and reliable attachment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] An embodiment of the present invention is given below in conjunction with the accompanying drawings, and the present invention will be further described through the embodiment. It should be pointed out that the specific implementation of the present invention is not limited to the forms described in the examples.
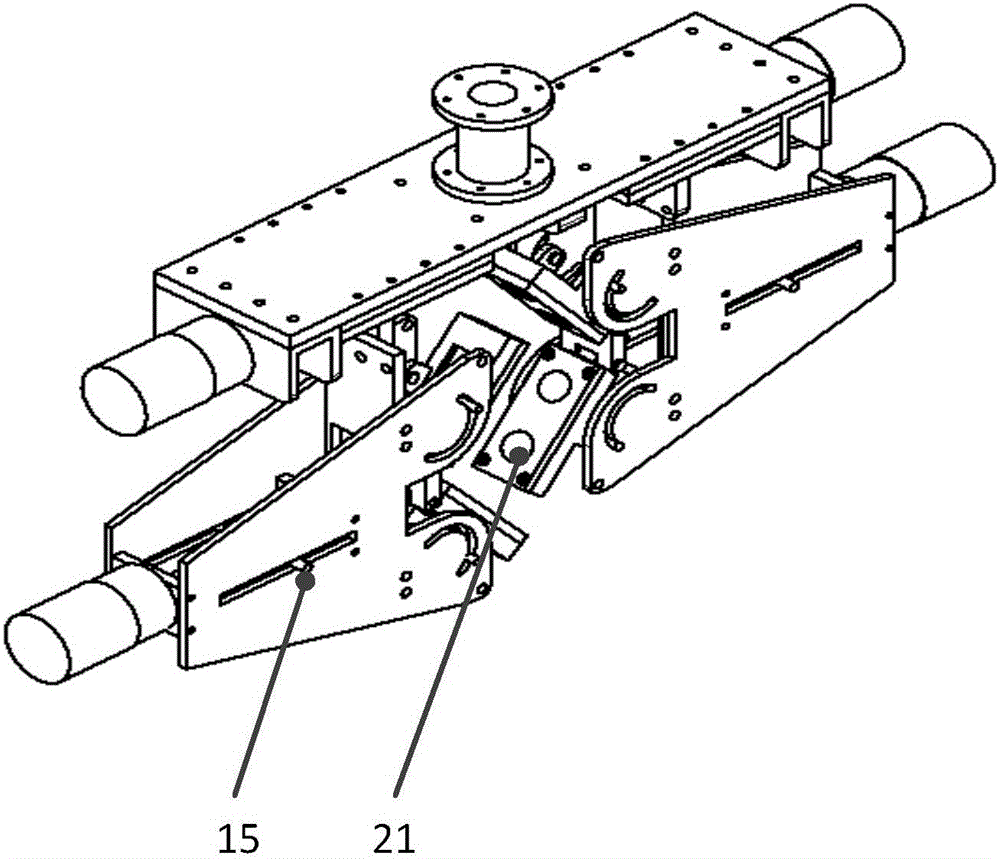
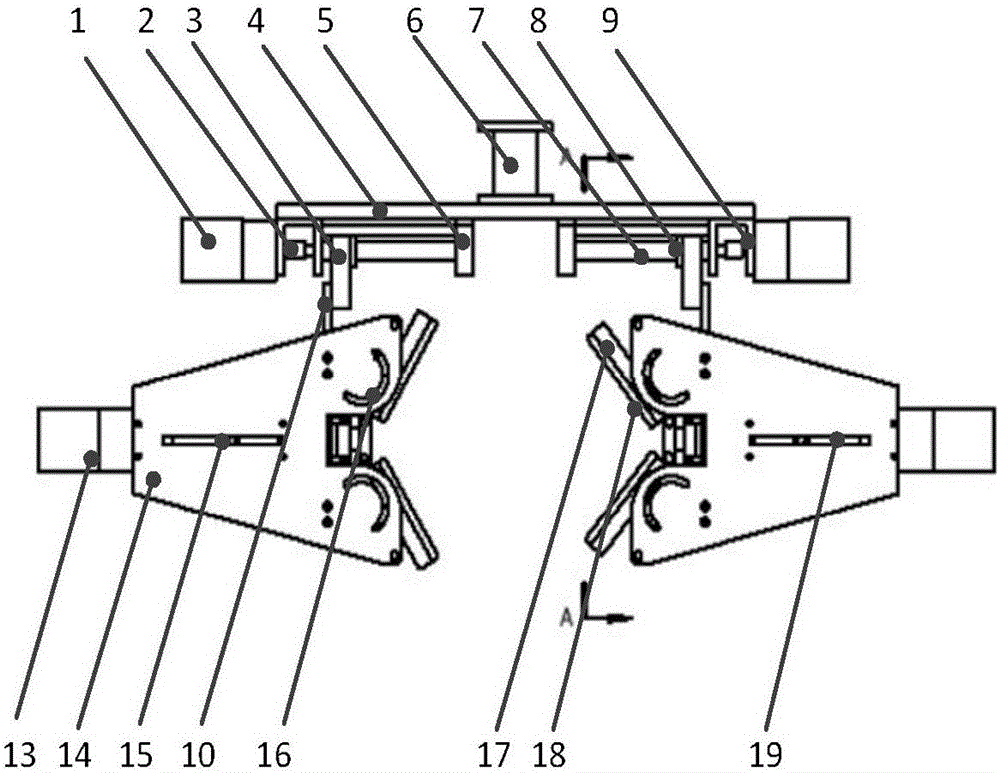
[0030] It mainly includes a device frame, two pairs of claw opening and closing mechanisms arranged oppositely and staggered, and a clamping mechanism that drives the two pairs of claws of the claw opening and closing mechanism to hold and clamp tower members.
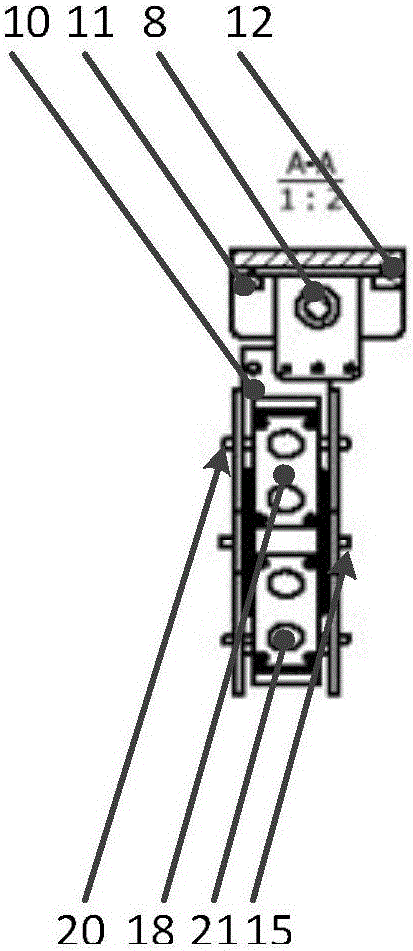
[0031] The holding and clamping mechanism that drives the two pairs of claw opening and closing mechanism to hold and clamp the tower frame member, its structure is as attached diagram 2-1 , 2-2 As shown in 2-3, the two holding and clamping mechanisms have the same structure and a symmetrical layout. The first drive motor support 9, the guide rail support block 12, and the guide rail cover are insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More