Intelligent robot possessing environment perception capability
An intelligent robot and environment perception technology, applied in the field of robotics, can solve problems such as low calculation accuracy, insufficient perception dimension, and poor real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
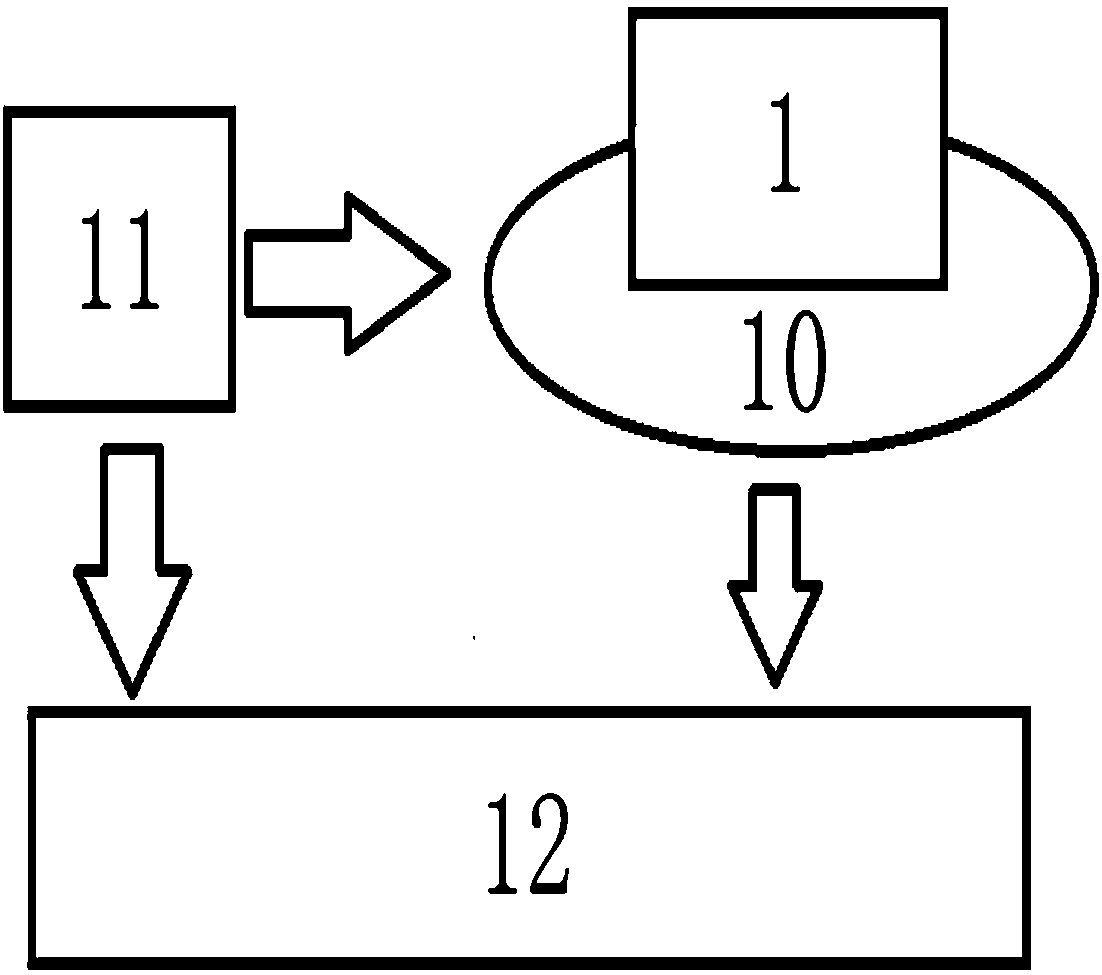
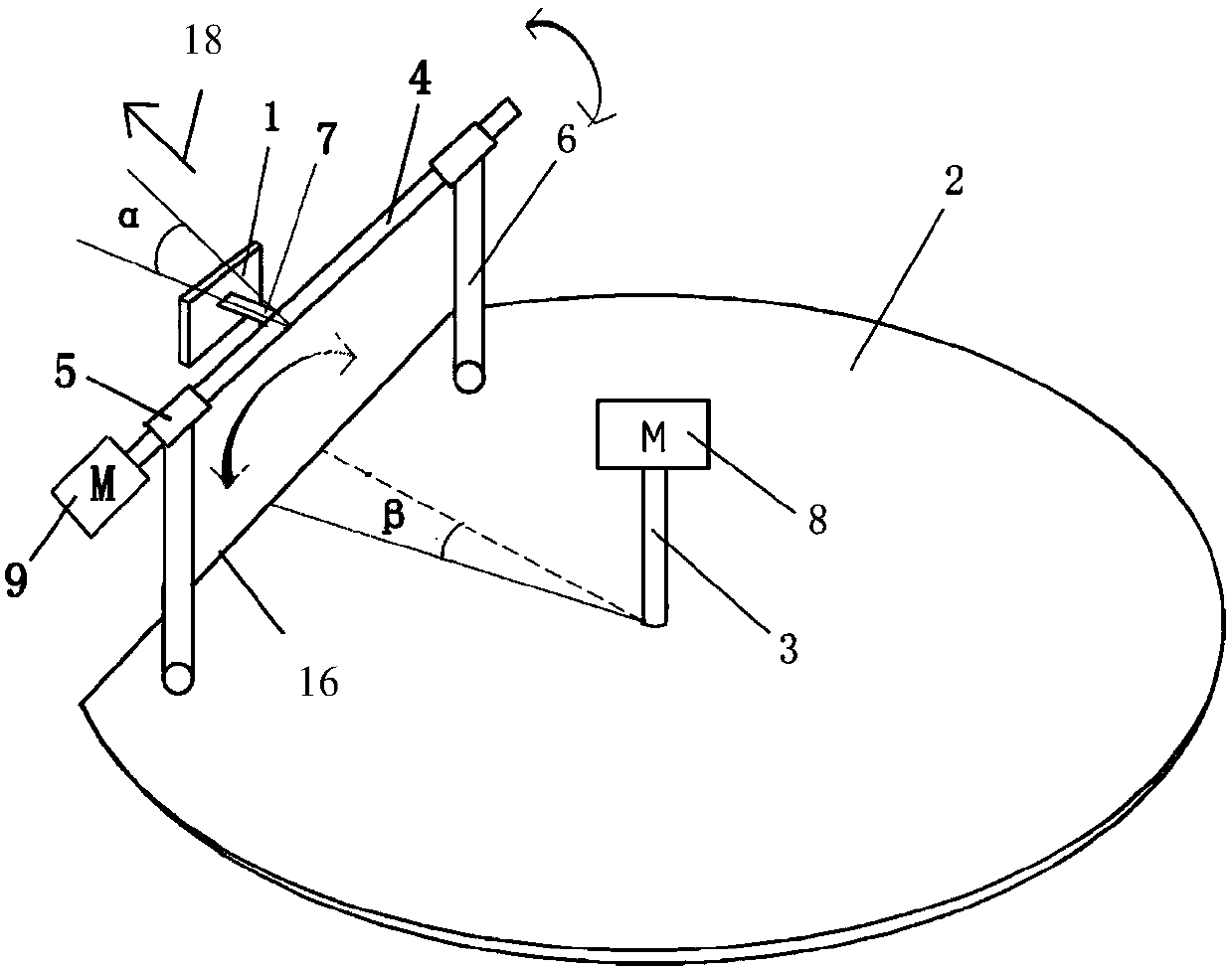
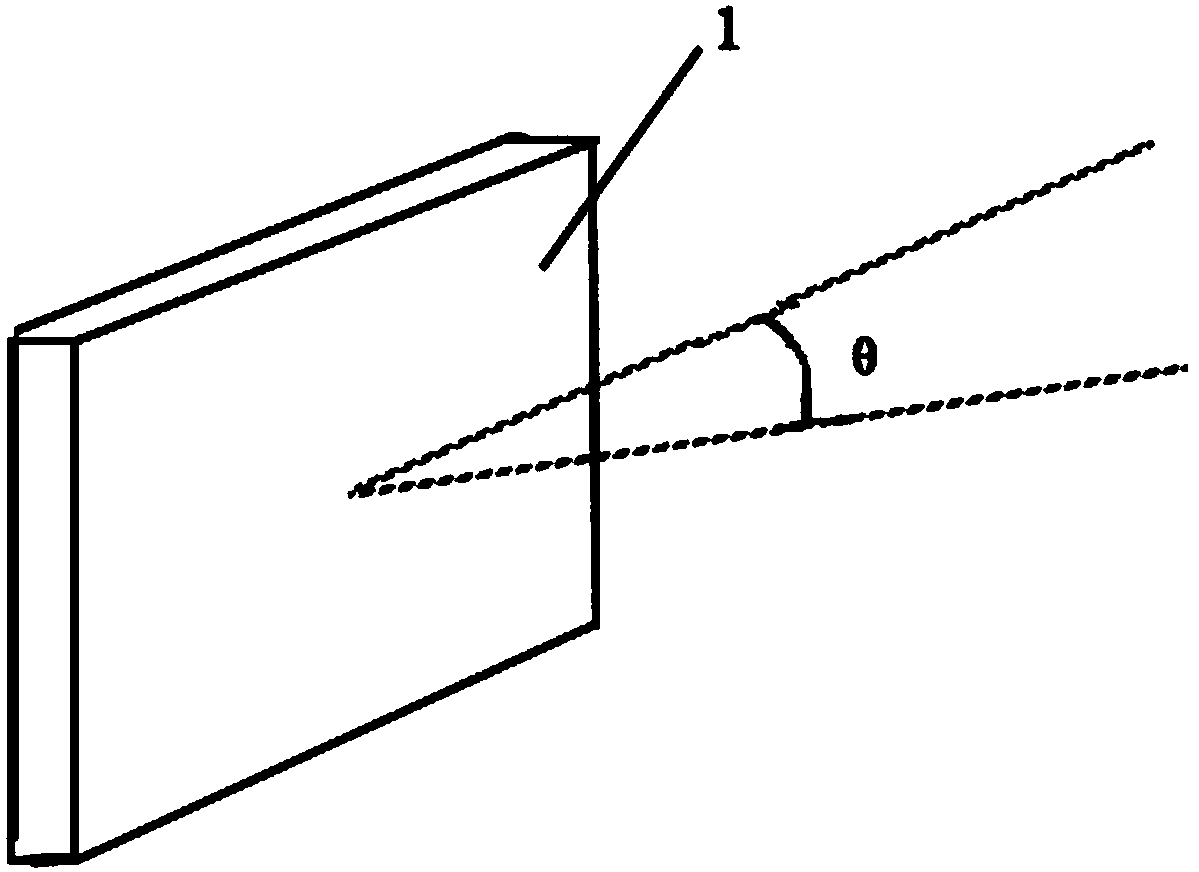
[0032] like Figure 1-4The shown intelligent robot with environmental awareness includes a robot and a millimeter-wave radar three-dimensional environment perception system installed on the robot; the millimeter-wave radar three-dimensional environment perception system includes a millimeter-wave radar 1, a rotating mechanical device 10, and a control unit 11 And data processing unit 12; The rotary mechanical device includes a first rotating shaft 3, a rotating disk 2 and a second rotating shaft 4, the first rotating shaft 3 is vertically arranged and fixed to the center of the rotating disk 2, the first The rotating shaft 3 is driven to rotate by the first stepping motor 8; the second rotating shaft 4 driven by the second stepping motor 9 is horizontally sleeved in the bearing seat 5, and the bearing seat 5 is supported by two vertically arranged supporting shafts 6 is fixed on the rotating disk 2; a connecting part 7 is provided at the midpoint of the second rotating shaft 4...
Embodiment 2
[0050] like Figure 1-4The shown intelligent robot with environmental awareness includes a robot and a millimeter-wave radar three-dimensional environment perception system installed on the robot; the millimeter-wave radar three-dimensional environment perception system includes a millimeter-wave radar 1, a rotating mechanical device 10, and a control unit 11 And data processing unit 12; The rotary mechanical device includes a first rotating shaft 3, a rotating disk 2 and a second rotating shaft 4, the first rotating shaft 3 is vertically arranged and fixed to the center of the rotating disk 2, the first The rotating shaft 3 is driven to rotate by the first stepping motor 8; the second rotating shaft 4 driven by the second stepping motor 9 is horizontally sleeved in the bearing seat 5, and the bearing seat 5 is supported by two vertically arranged supporting shafts 6 is fixed on the rotating disk 2; a connecting part 7 is provided at the midpoint of the second rotating shaft 4...
Embodiment 3
[0068] like Figure 1-4The shown intelligent robot with environmental awareness includes a robot and a millimeter-wave radar three-dimensional environment perception system installed on the robot; the millimeter-wave radar three-dimensional environment perception system includes a millimeter-wave radar 1, a rotating mechanical device 10, and a control unit 11 And data processing unit 12; The rotary mechanical device includes a first rotating shaft 3, a rotating disk 2 and a second rotating shaft 4, the first rotating shaft 3 is vertically arranged and fixed to the center of the rotating disk 2, the first The rotating shaft 3 is driven to rotate by the first stepping motor 8; the second rotating shaft 4 driven by the second stepping motor 9 is horizontally sleeved in the bearing seat 5, and the bearing seat 5 is supported by two vertically arranged supporting shafts 6 is fixed on the rotating disk 2; a connecting part 7 is provided at the midpoint of the second rotating shaft 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More