

Robot ship system used for acquiring water-area information and control method of robot ship system
A technology for information collection and robotics, which is applied in the field of water IoT and robotic ships, and can solve the problems of insufficient computing power, poor scalability, poor compatibility and scalability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings.
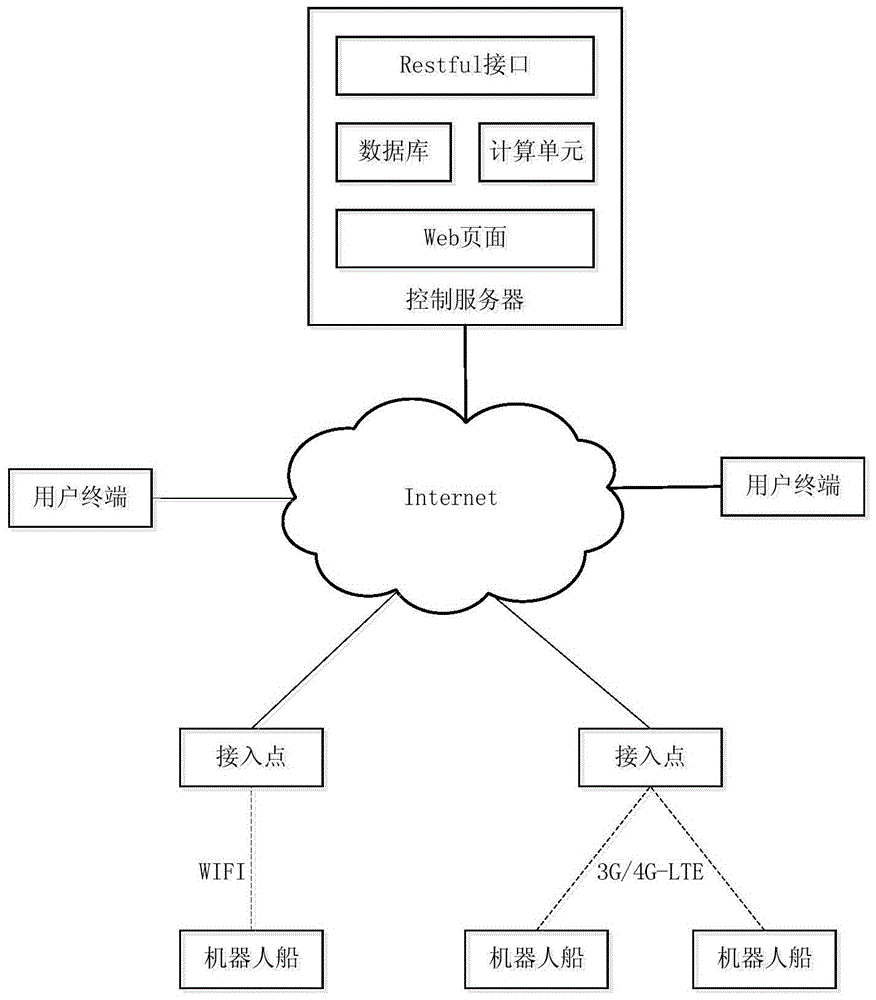
[0035] figure 1 Shown is the system structure diagram of the robot ship and its control system, including the robot ship terminal, the control server, the user terminal and the communication network connecting the former three. The robot ship system realizes the autonomous navigation and monitoring data sharing of the robot ship through equipment networking and remote monitoring technology. The access point, control server, and user terminal of the robot ship system communicate through the TCP / IP network protocol, and the access point and the robot ship are connected by mobile wireless communication technology based on WIFI or 3G / 4G-LTE. The present invention mainly realizes following functions:
[0036] 1) The connection and data communication between the smartphone and the server;
[0037] 2) Connection and data communication between smartphone and micro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More