

Sequence control and adjustment method based on PID algorithm and queue model
A technology of sequential control and adjustment method, applied in the direction of controller and electric controller with specific characteristics, can solve the problems of wasting manpower and human error, and achieve the effect of good adaptability, fault tolerance and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
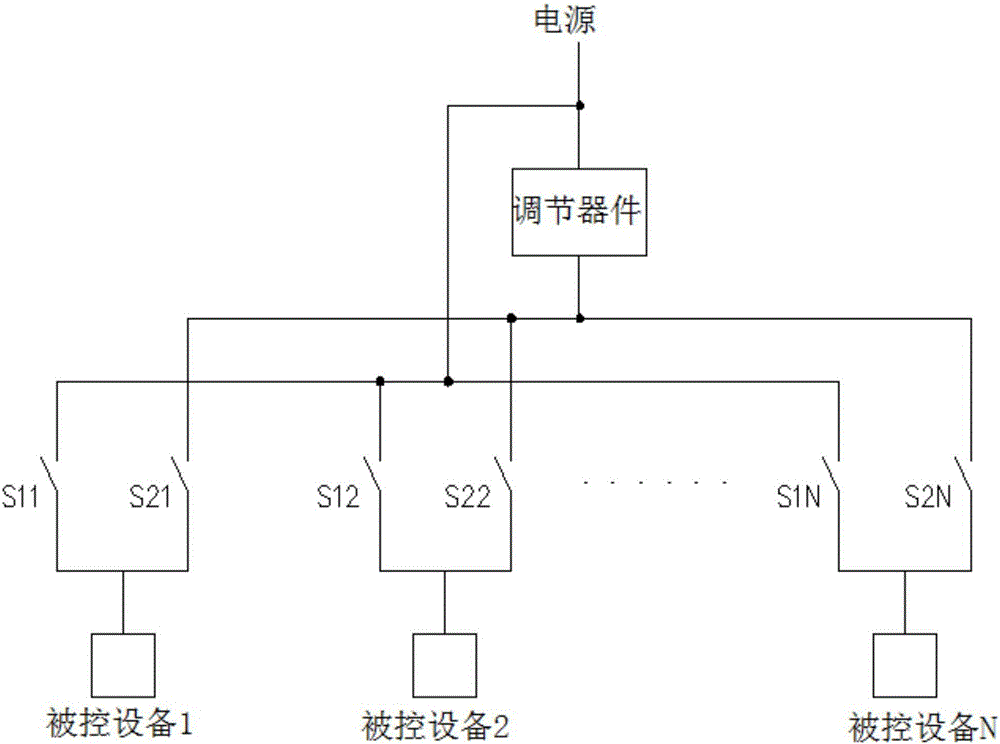
[0037] Such as figure 1 As shown, this embodiment provides a sequence control and adjustment method based on the PID algorithm and the queue model. Its hardware equipment includes a control device (not shown in the figure), a regulator device, multiple groups of controlled devices whose power is P, and switching devices twice the number of controlled devices. There are 2 switching devices (named as the first switching device and the second switching device respectively for the convenience of distinction), record the number of controlled devices as N, and the number of the first switching device corresponding to the controlled device as S 11 ~S 1N , the number of the second switching device corresponding to the controlled device is S 21 ~S 2N .
[0038] The method in this embodiment includes the following steps:
[0039] (1) The N groups of controlled devices whose power is all P are respectively passed through the N groups numbered S 11 ~S 1N The first switching device ...
Embodiment 2
[0058] This embodiment also provides a sequence control and adjustment method based on PID algorithm and queue model, which is different from Embodiment 1 in that it also includes adjusting the power of a certain switching device and power within the set timing duration D The steps of exchanging equipment, define the array J to store S 21 ~S 2N address, define the address of the switching device to be replaced as a, a=1~N, set the address of the power regulating device to be N, and when the set timing duration D arrives, interrupt steps (4) and (5), After turning off the second switching device pointed to by JN and I a points to the first switching device, and closes J a pointing to the second switching device, after executing the swap instruction, the I N with I a The addresses in the exchange, and at the same time JN and J a The addresses in are exchanged, and then the interrupt returns; among them, the exchange instructions are as follows,
[0059] a=mod(a,N)+1
[00...
Embodiment 3
[0062] This embodiment also provides a sequence control and adjustment method based on the PID algorithm and queue model, which is different from Embodiment 2 in that: the first switching device and the second switching device connected to any controlled device at the same time interlock.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More