

Carrier-based aircraft autonomous landing method based on explicitly nonlinear model predictive control
A nonlinear model and predictive control technology, applied in non-electric variable control, vehicle position/route/altitude control, attitude control and other directions, which can solve a large number of calculations, troublesome control law derivation, and complex six-degree-of-freedom equations of motion for carrier-based aircraft. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
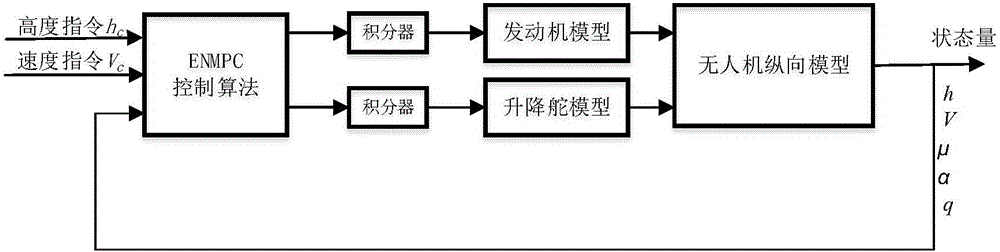
[0081] In the following, a carrier-based aircraft F / A-18A is taken as an example, and its longitudinal landing control law is designed by using explicit nonlinear model predictive control and F / A-18A linear equations. Then build the simulink model and use the F / A-18A model for simulation, MATLABR2014a version.
[0082] The design of the longitudinal control law for autonomous landing of carrier-based aircraft based on explicit nonlinear model predictive control is as follows:
[0083] Since the control of the speed by the throttle is relatively simple, it is not described here, only the control of the height by the elevator is described. In the process of designing the control of the height, it is assumed that the speed is controlled by the throttle and has been constant. In the following derivation, the use of the elevator δ e When controlling the control algorithm of height h, it is assumed that V is a constant value, that is
[0084] Step 1: Simplify the longitudinal mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More