Station identification system based on AGV and control method thereof
A technology for identifying systems and workstations, which is applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc., which can solve the complicated operation, difficult to coordinate management and flexible setting of multiple AGVs , increase control costs and other issues to achieve the effect of efficient station identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
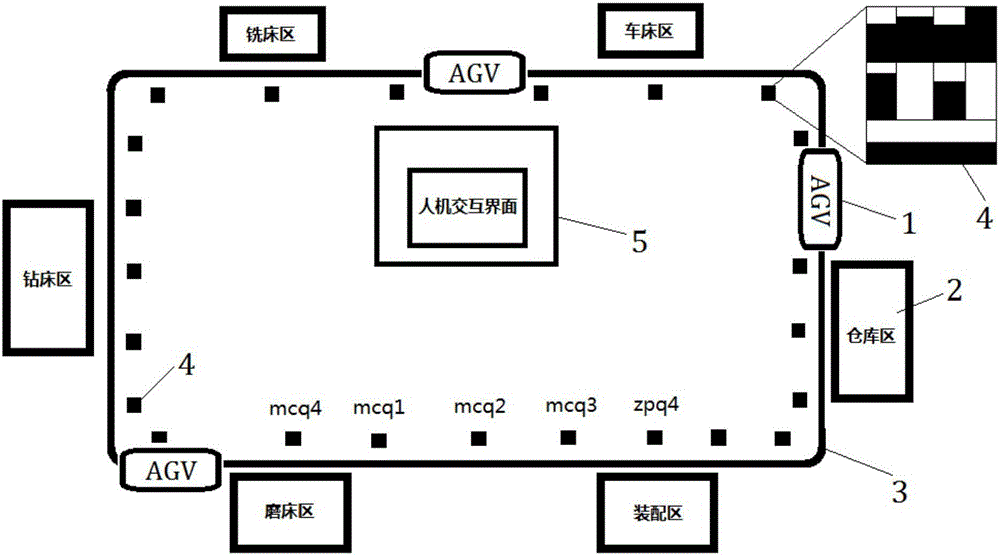
[0031] Such as figure 1 As shown, this embodiment relates to a station identification system based on AGV, including: AGV car body 1, guide rail 3, station identification 4 and central control interaction device 5, wherein: station identification 4 is set at the corresponding station Above, the AGV car body 1 runs along the guide rail 3 between different work areas 2 under the scheduling of the central control interaction device 5, reads the station identification 4 to obtain the corresponding string quantity 21, and transmits the string quantity 21 to the central control device and display the information of the corresponding station.
[0032] The guide rail 3 is preferably a black matte belt.
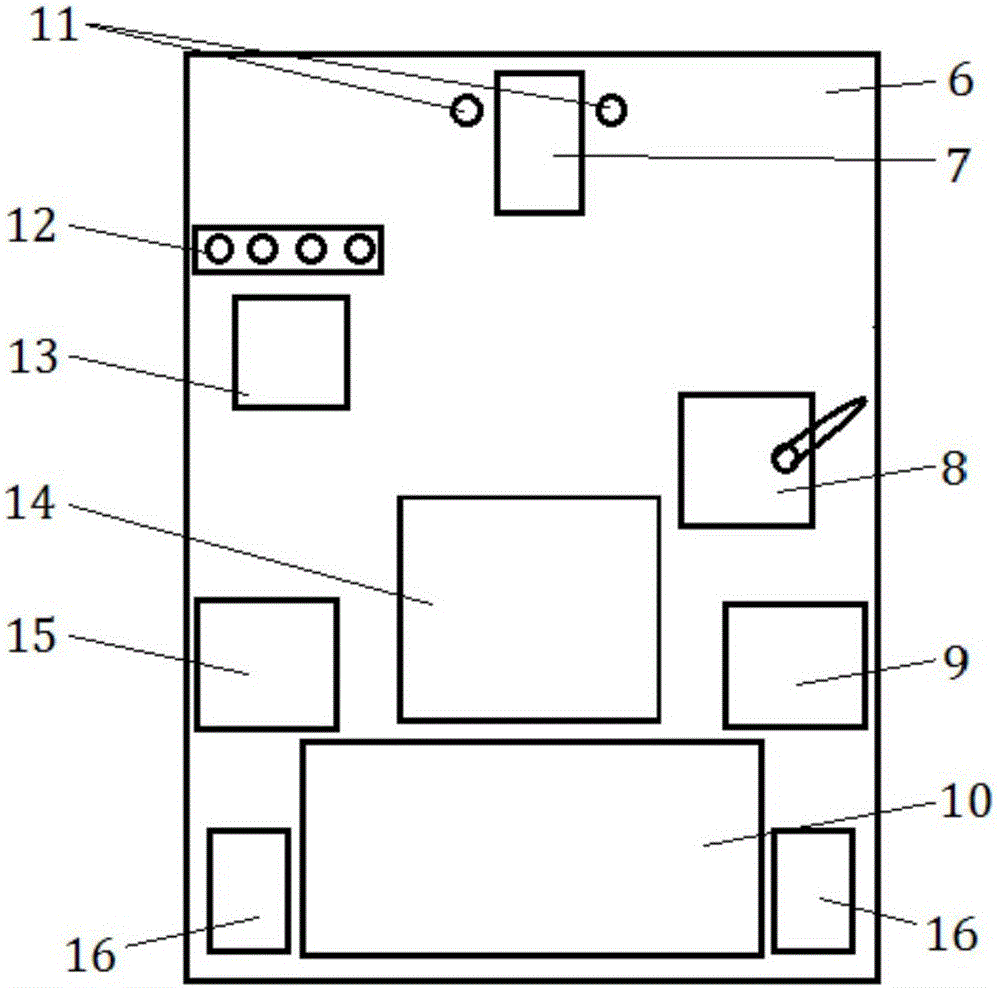
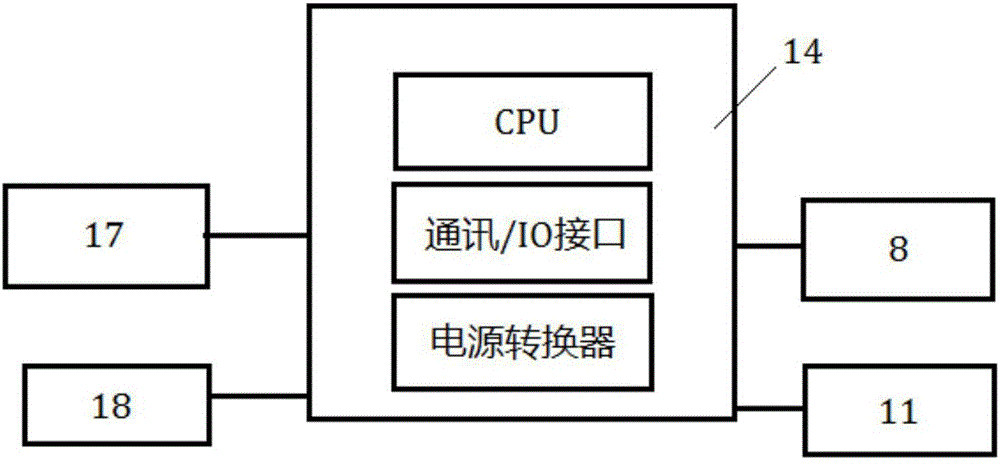
[0033] The AGV body 1 includes: a core board 14, a wireless communication unit 8, a servo drive unit 17, a universal wheel 7, a chassis 6, a loading platform 10, a station identification unit 18 and an infrared tracking sensor 11, wherein: The universal wheel 7, the core board 14 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com