

Four-foot bionic robot with planar four-bar metamorphic mechanism used on waist
A bionic robot and planar four-bar technology, applied in the field of bionic robots, can solve problems such as the difficulty of direct driving of the Hooke hinge, achieve the effects of improving mechanical movement efficiency, improving flexibility, and deep application potential
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] The first embodiment is a quadruped bionic robot using a planar four-bar metamorphic mechanism on the waist, and the planar four-bar metamorphic mechanism is in a single degree of freedom four-bar mechanism state.
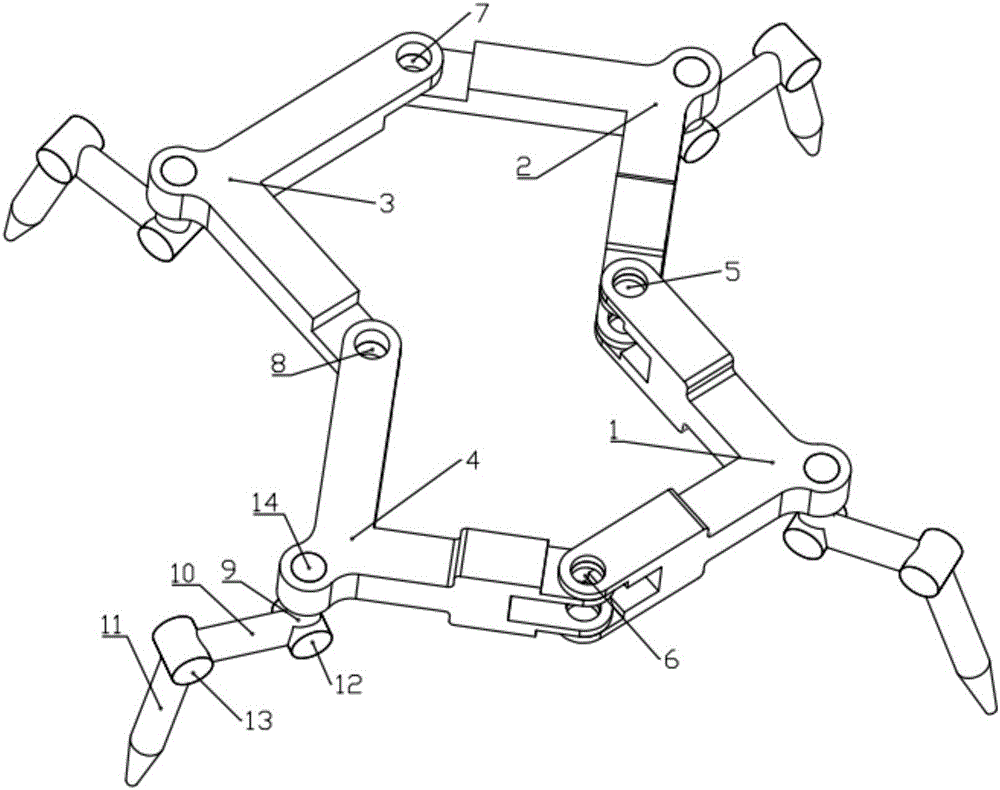
[0045] Such as figure 1 As shown, the present invention proposes a quadruped bionic robot using a planar four-bar metamorphic mechanism at the waist, including a closed chain and four open chains. The closed chain is composed of a first rod 1, a second rod 2, and a third rod. The rod 3 and the fourth rod 4 constitute a planar four-bar metamorphic mechanism. The open chain shown is a 2R tandem mechanism consisting of a fifth rod 9, a sixth rod 10, and a seventh rod 11.
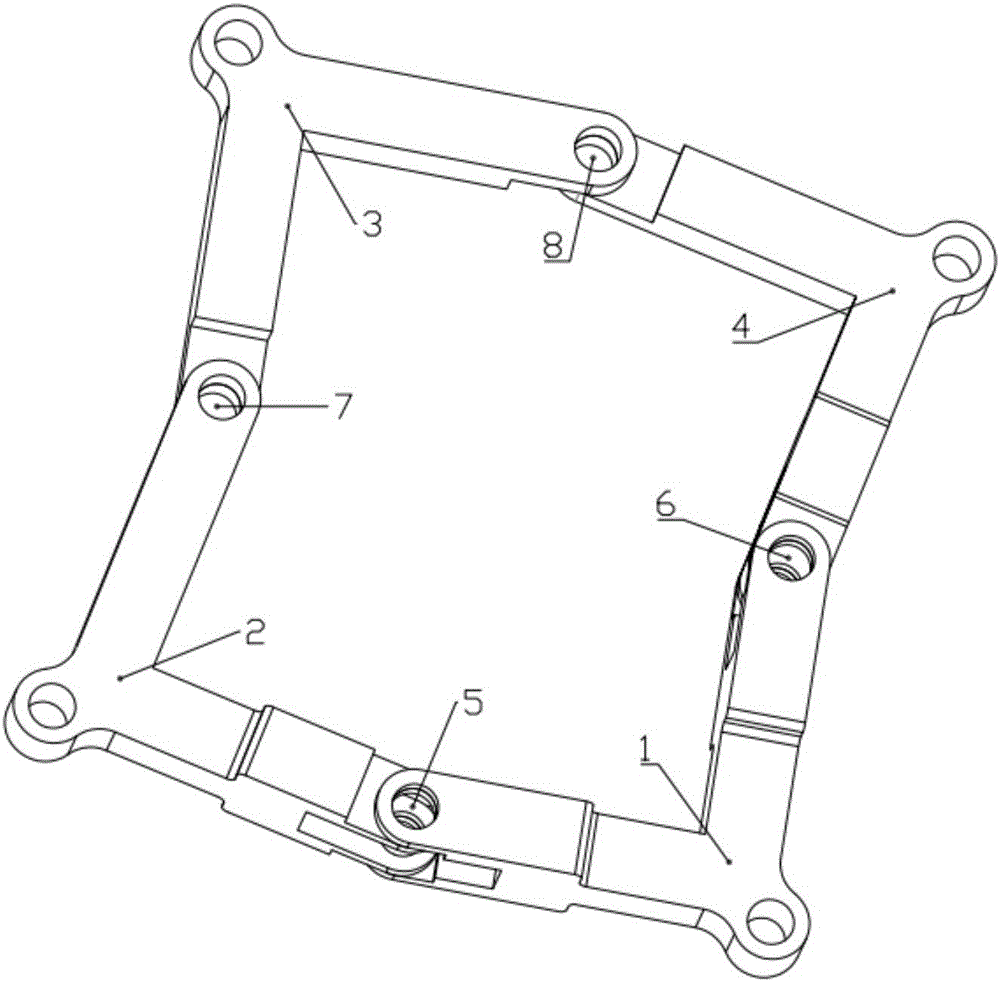
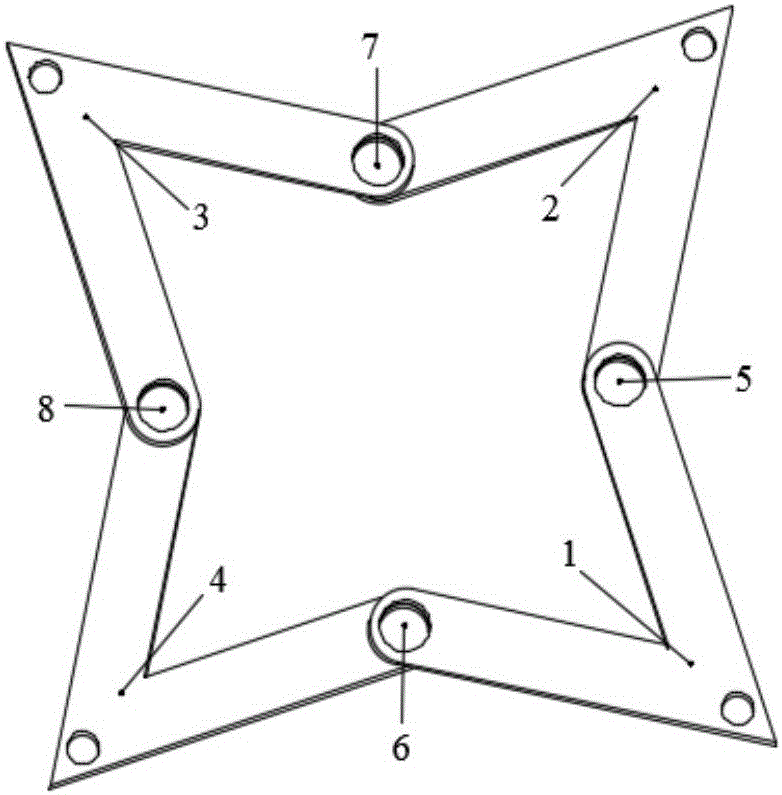
[0046] Such as figure 2 As shown, in the closed chain, both ends of the first rod 1 are connected to one end of the second rod 2 and one end of the fourth rod 4 through the first rotating hinge 5 and the second rotating hinge 6, respectively, and the first rotating hinge 9 and the second rotating ...
Embodiment 2
[0057] Example 2: Quadruped bionic robot using planar four-bar metamorphic mechanism on the waist
[0058] In the present invention, the spatial planar four-bar metamorphic mechanism (ie, closed chain) has multiple configurations, and the topological structure and degree of freedom of the mechanism are different in each configuration.
[0059] The waist mechanism (closed chain) of the metamorphic multi-legged bionic robot of the present invention can be deformed, and can be adjusted for movement and adaptability. For example, when encountering a narrow curve, the present invention can make the waist twist at an angle and can smoothly turn the curve, which cannot be achieved if it is a multi-legged bionic robot with a rigid waist.
[0060] The metamorphic multi-legged bionic robot of the present invention can adjust the center of gravity of the waist (closed chain) through the deformation of the waist mechanism (closed chain), so that the center of gravity of the waist is always in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More