

Six-wheel/leg robot compound movement path programming method
A path planning and compound motion technology, applied in the field of robotics, can solve the problems of lack of solutions, restricting the development and application of wheel/leg compound motion robots, and achieve the effect of wide application, increasing average running speed, and improving passability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
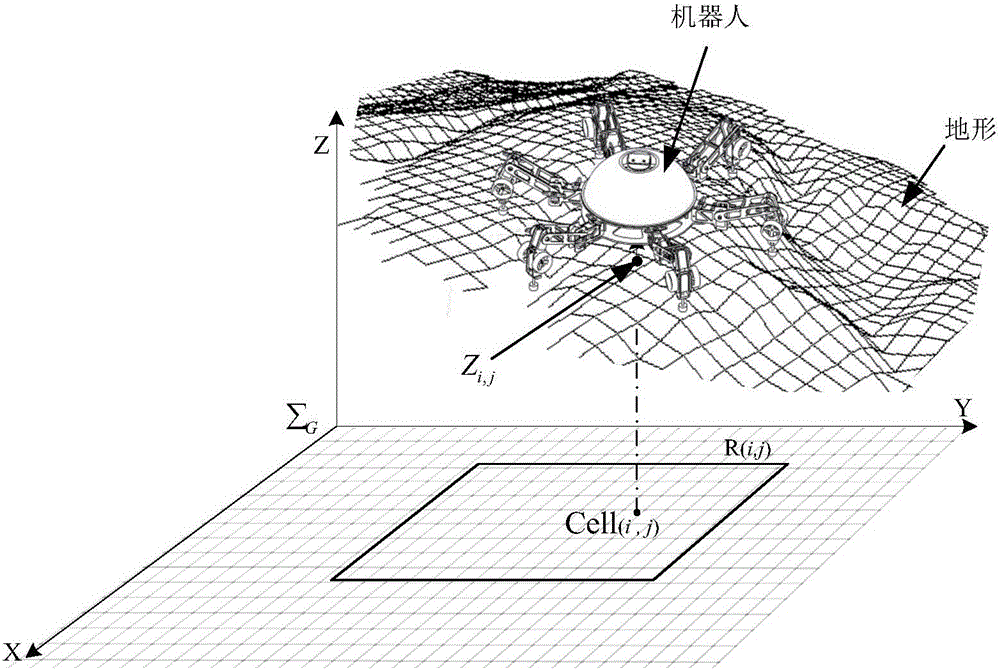
[0022] The six-wheel / leg robot compound motion path planning method of the present invention, such as figure 1 As shown, it is realized through the following steps:
[0023] Step 1: Detect and determine the working environment information of the robot, and establish a DEM (digital elevation) map of its working environment;
[0024] According to the diameter and motion state of the robot, the perception system is used to detect the geomorphic features of a certain area around the robot, including the position and shape of obstacles around the robot and the texture characteristics of the surface, and a DEM (digital elevation) map of the robot's working environment is established.
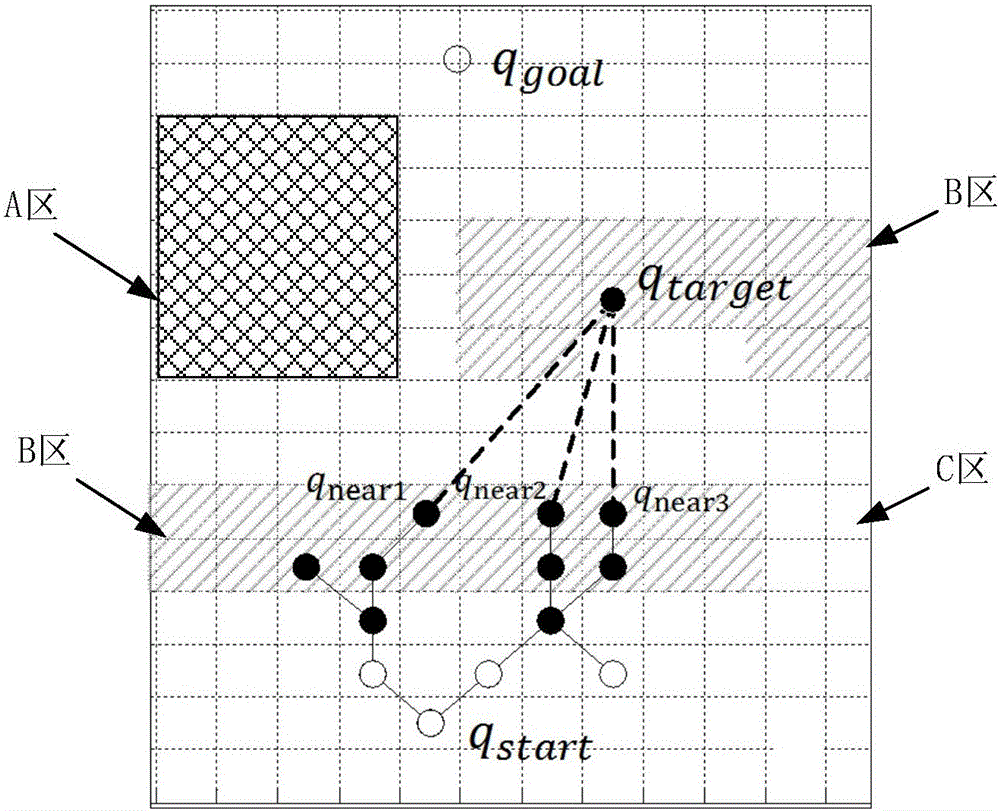
[0025] Step 2: Generate the corresponding rasterized wheel / leg motion cost map;
[0026] a. Perform feature extraction on the DEM map established in step 1, including: three topogr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More