

Attitude control thruster layout optimization method for combined spacecraft
A thruster layout and combined spacecraft technology, which is applied in the field of satellite attitude control, can solve the problems of thruster layout optimization, etc., and achieve the effect of prolonging the working life of the orbit and reducing fuel consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0149] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
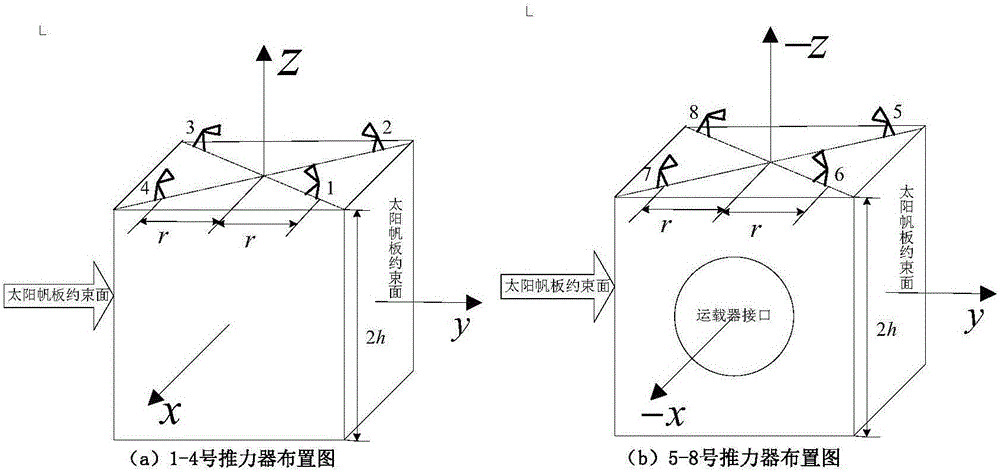
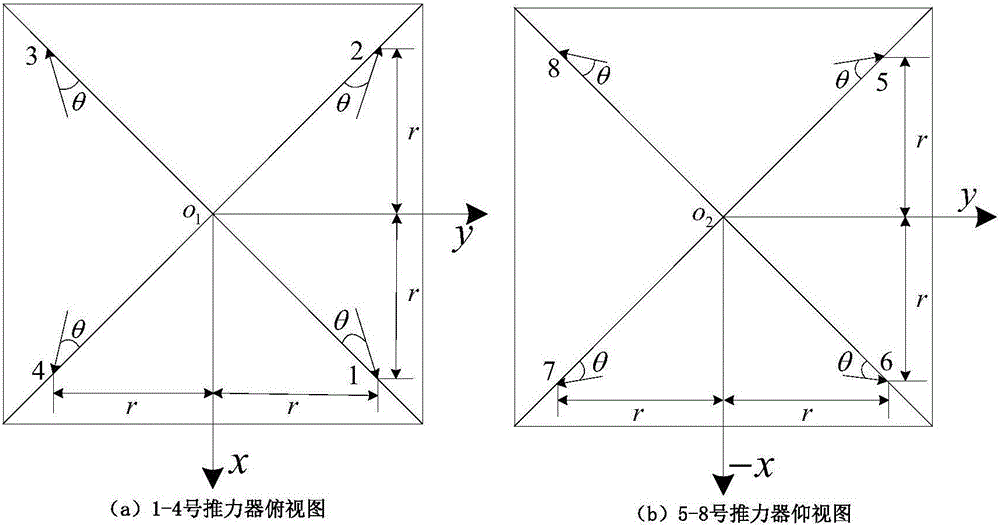
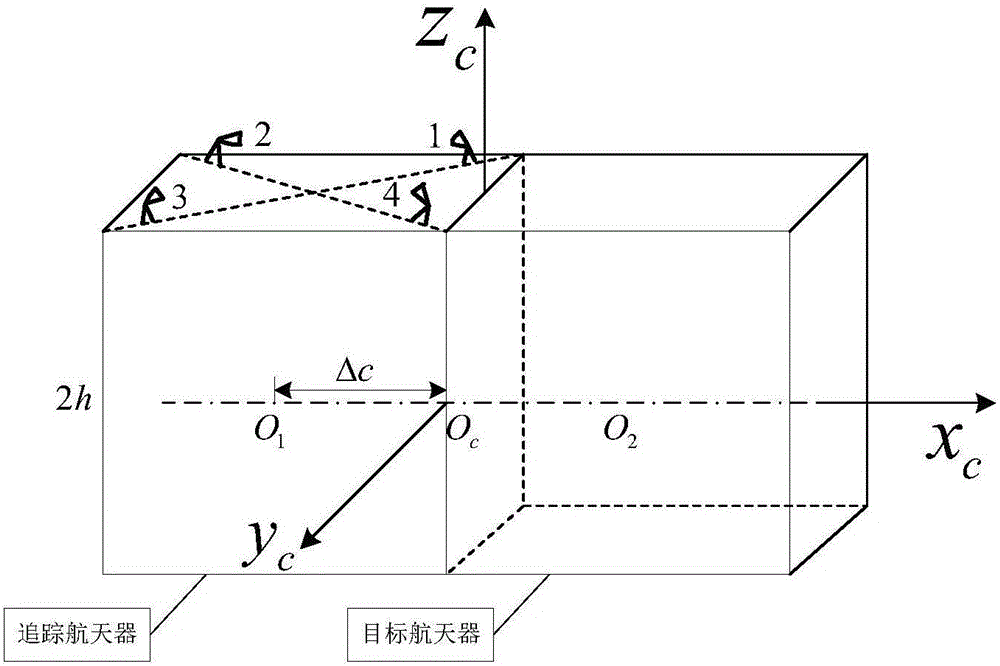
[0150] A method for optimizing the layout of a combined spacecraft attitude control thruster according to the present invention takes a tracking spacecraft in the shape of a cube (2m×2m×2m) as the research object, which has the same shape as the target satellite it docks with. The tracking spacecraft is configured as figure 1 , figure 2 As shown, the configuration of the combined spacecraft after rendezvous and docking is as follows image 3 shown.
[0151] The rotation mode of the universal joint installed at the joint of the thruster is as follows: Figure 4 , Figure 5 shown. The universal joints are installed on the thrusters 1, 2, 1 and 2 of the combined spacecraft respectively, and the simulation is carried out according to the different rotation modes of the universal joints.
[0152] Its simulation parameters are as follows:
[0153] Tab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More