

Three dimensional SLAM method based on events with depth enhanced vision sensor
A vision sensor and vision-enhancing technology, applied in directions such as road network navigators, can solve the problems of expensive power, resource consumption, consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings.
[0051] An event-based three-dimensional SLAM method with a depth enhanced vision sensor, characterized in that: the method comprises the steps of:
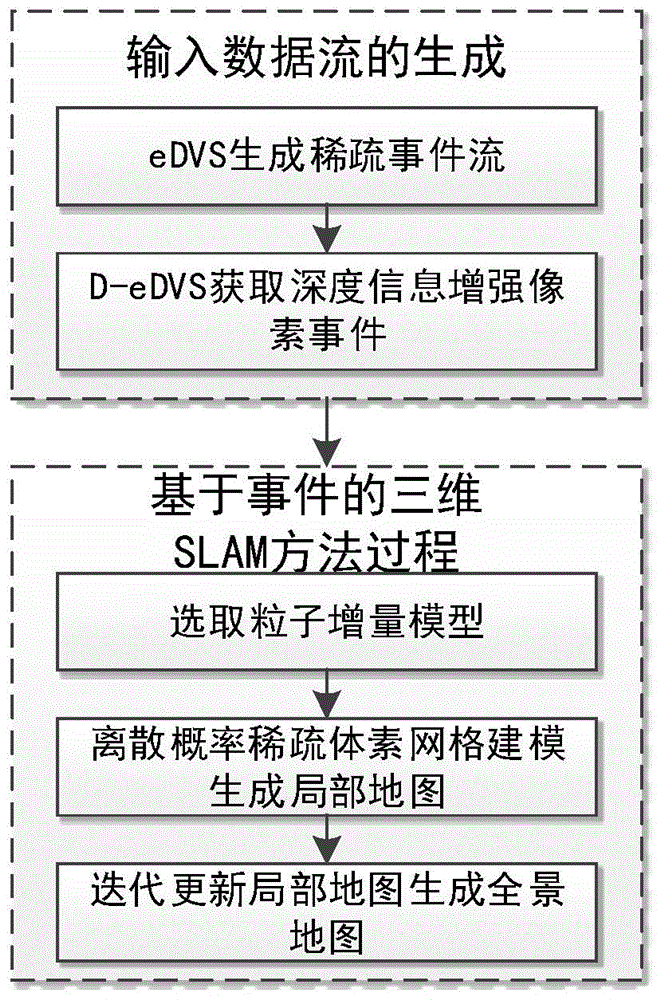
[0052] Step 1: Generation of input data stream:
[0053] Step 1.1: eDVS generates sparse event streams: The embedded dynamic vision sensor (eDVS) is used to directly generate dynamically changing sparse event streams, which only requires hardware support without software preprocessing.
[0054] Step 1.2: D-eDVS Acquires Depth Information Enhanced Pixel Events: Combining an Embedded Dynamic Vision Sensor (eDVS) and a Separate Active Depth Sensing Sensor (PrimeSense RGB-D) Asus Xtion Pro Live with a resolution of 320*240, frequency 69Hz, and calibrate the corresponding pixels on the two sensors; the depth sensing sensor (PrimeSense RGB-D) can obtain the depth information of the corresponding pixel position of each generated...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More