

Path programming and navigation system based on improved artificial potential field method and method thereof
A path planning, artificial potential field technology, applied in control/regulation systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc. Escape and security effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
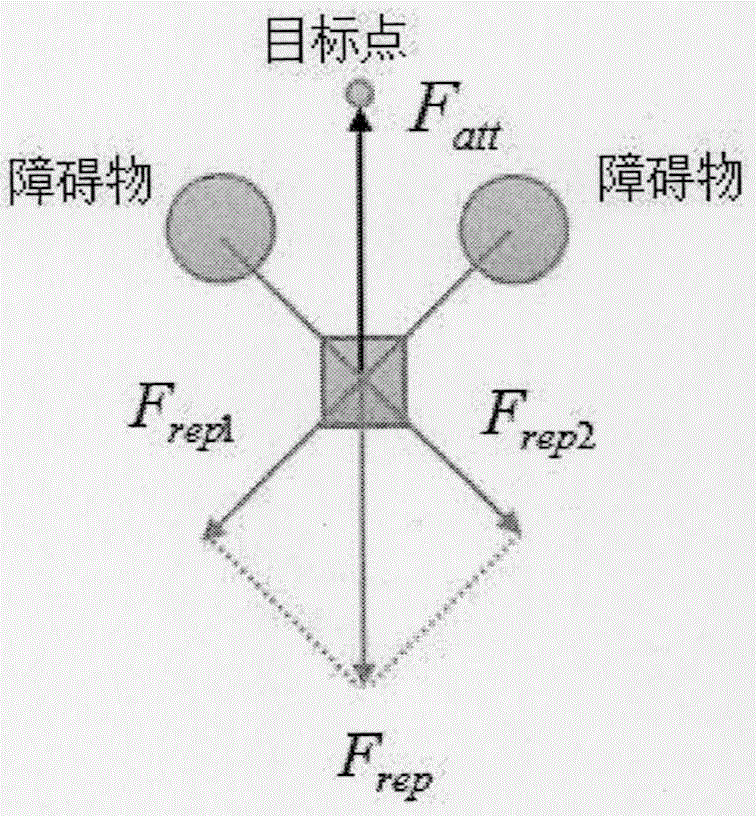
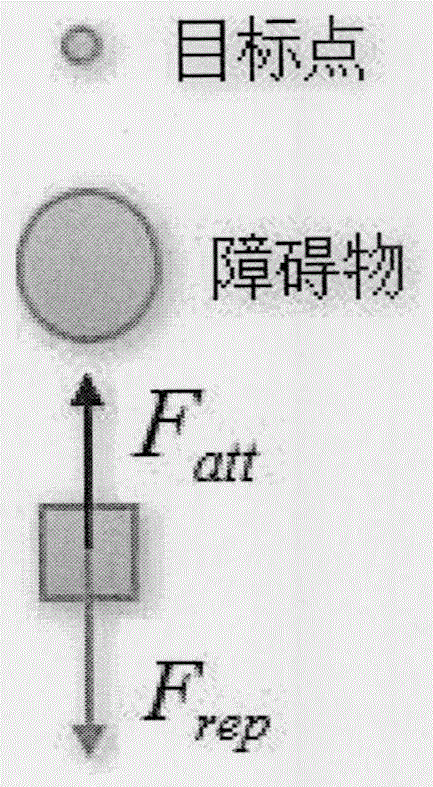
[0050] In the traditional artificial potential field function, the total potential field of the environment model is as follows:
[0051] u total =U att + U rep (5)
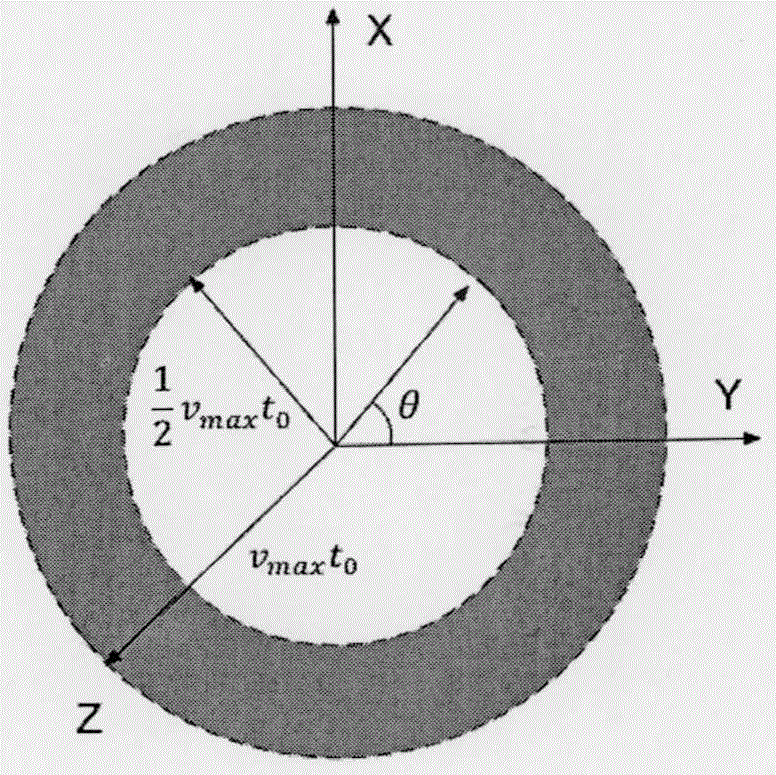
[0052] When the robot is trapped in a local minimum point during path planning, the disturbance potential field is added to make the robot escape from the local minimum point. The definition of the disturbance potential field is as follows:
[0053]
[0054] Among them, K dis is the disturbance potential field constant; ρ(X, X g ) is the distance from the robot to the target point; ρ a It is the judging distance for whether the robot reaches the target point.
[0055] After introducing the disturbance potential field, when the robot falls into a local minimum point, the total potential field of the environment model is as follows:
[0056] u total =U att + U rep + U dis (7)
[0057] If the disaster relief robot falls into a local minimum point, add a disturbance potential field to the potential f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More