

Blended laser navigation method of AGV (Automated Guided Vehicle)
A technology of laser navigation and trolley, which is applied in the direction of motor vehicles, two-dimensional position/channel control, vehicle position/route/height control, etc. and other issues, to achieve the effect of changing and using a wide range of environments, convenient automatic charging, and low environmental requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The specific embodiments of the present invention will be described below in conjunction with the drawings:
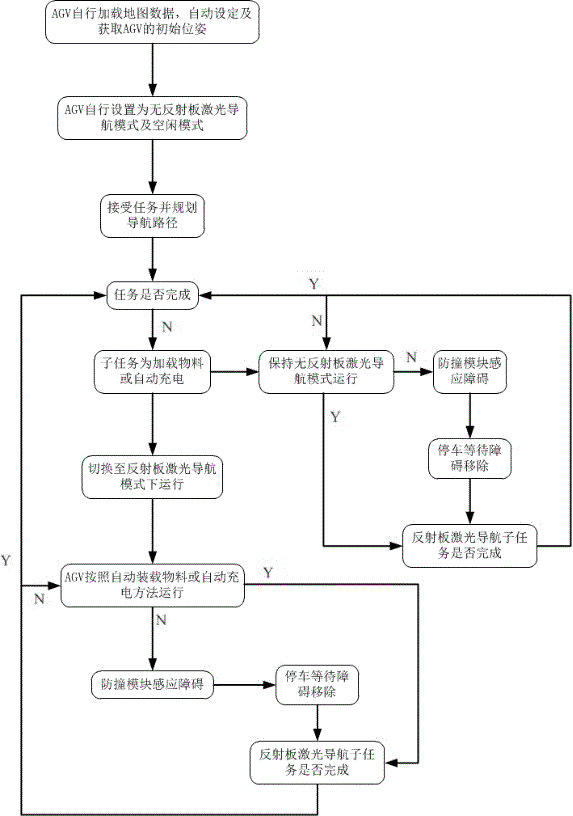
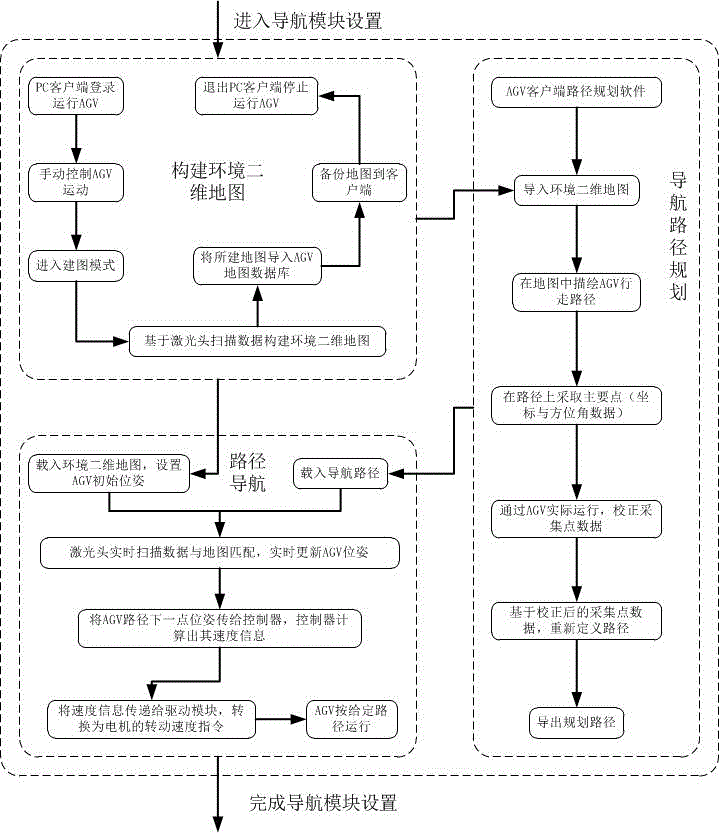
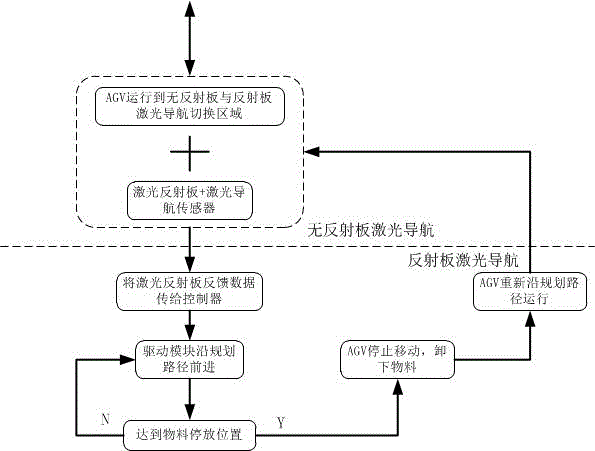
[0087] In this specific embodiment, a hybrid laser navigation system designed by the present invention with no reflector and reflector realizes the hybrid navigation of AGV trolley. By combining the features of flexible laser navigation path, low cost and no environmental changes, the laser navigation system without reflector is used. And the local reflector laser navigation positioning accuracy characteristics, provide a hybrid navigation method with flexible navigation path and high positioning accuracy at the same time, and the overall cost is relatively low. Among them, the hybrid navigation system is only equipped with laser reflectors in the loading area, unloading area and automatic charging area, while other use areas use non-reflective laser navigation.
[0088] The hybrid navigation system is mainly divided into three modules: laser navigation module, refle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More