Robot routing on-line control method oriented to dynamic environments
A control method and dynamic environment technology, applied in the field of machine learning, can solve the problems of re-executing other actions, low efficiency of Macro-Q learning, and limited application environment of abstract actions, so as to improve efficiency and expand the application environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
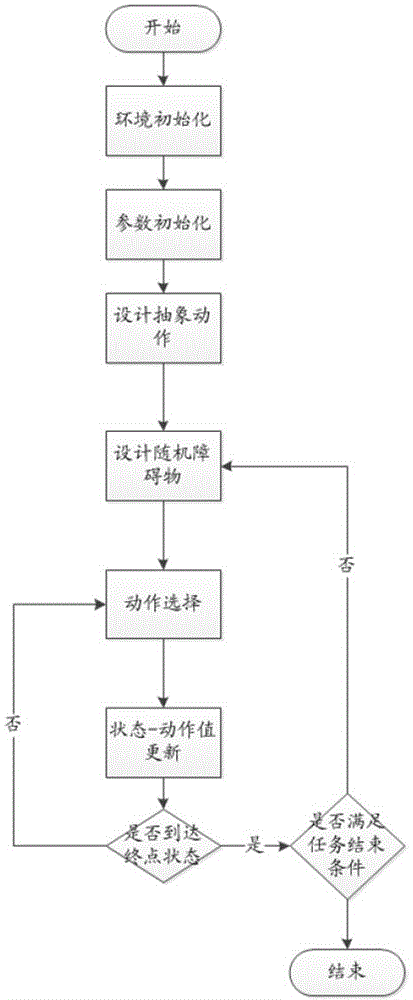
[0045] Example: refer to figure 1 As shown, an online control method for robot path-finding that can interrupt abstract actions in a dynamic environment, specifically includes the following steps:
[0046] 1) Environment and parameter initialization: set the operating environment of the robot, the reward value for the robot to reach the goal, the step size parameter for updating the value, and the discount factor parameter. The operating environment includes the boundary of the environment, the starting position of the task, the end position, The position of fixed obstacles in the environment, and each position is regarded as a state;
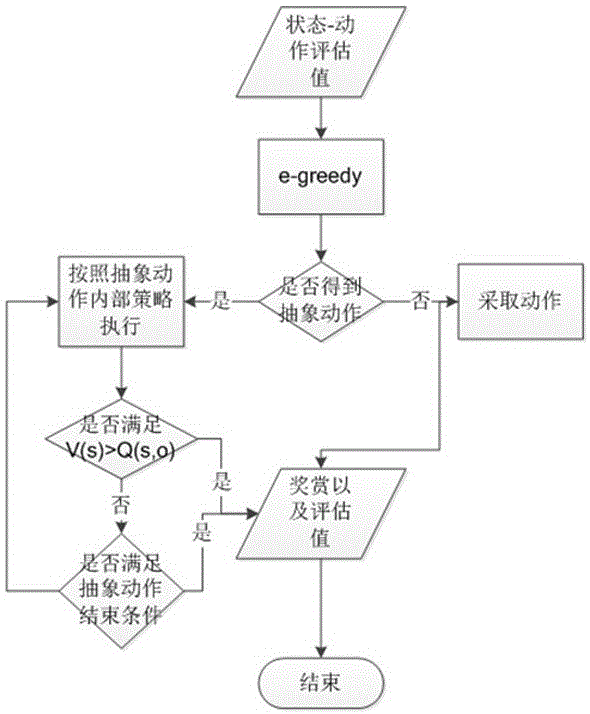
[0047] 2) Design a pre-given set of abstract actions, add the set of abstract actions to the optional actions of the robot, and initialize all state-action evaluation values at the same time , where each abstract action in the abstract action set consists of the following three parts: initial state set, internal strategy and termination con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com