

Advanced humanoid dancing robot
A dance robot and advanced technology, applied in the field of robotics, can solve the problems of lack of waist joints and toe joints, inconvenience in work, inability to complete difficult dance movements, etc., to achieve the effect of humanization and reliable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
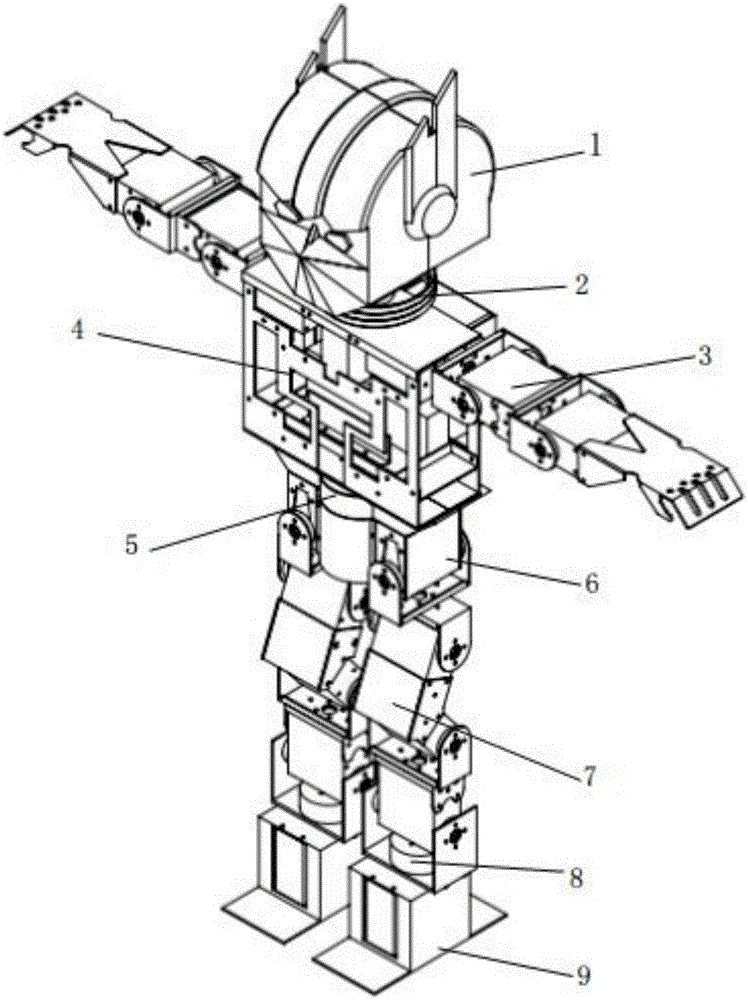
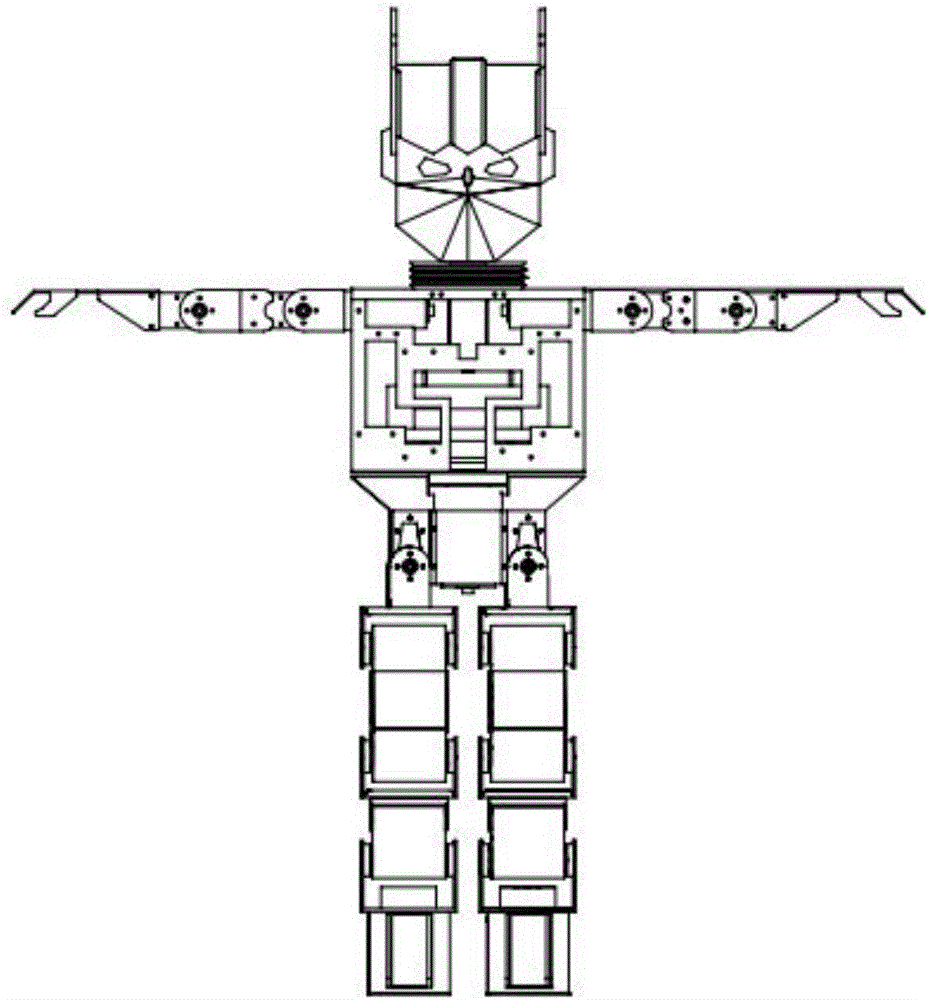
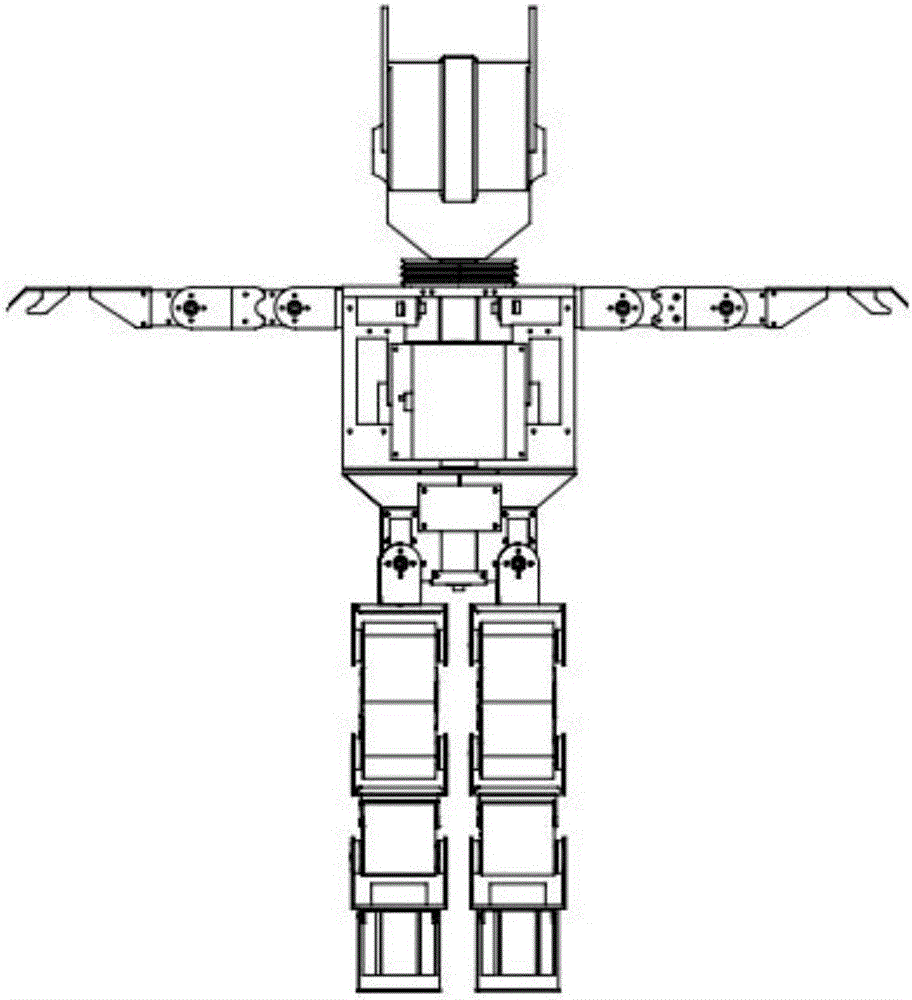
[0027] refer to figure 1 , figure 2 and image 3 , the high-level humanoid dance robot of the present embodiment is 640mm tall, and the distance between the fingertips of both arms is 474mm after the arms are opened. The thickness of the robot is no more than 76mm, the leg width is 53mm, and the arm width is 55mm. The robot includes four parts, including head 1, body (including chest structure 4, waist joint 5, hip structure 6), upper limb 3, lower limb 7 (including foot joint 8, leg and foot plate 9), and the whole robot consists of 20 It consists of two joints, among which the rotatable waist joint 5 and foot joint 8 are the key points of the present invention.
[0028] The head 1 is prepared by 3D printing technology, its shape imitates the human head, and the inside is hollowed out to meet the conditions for subsequent addition of required modules, and it is connected to the head connecting frame 2 .
[0029] A safety gasket is installed between the double-arm U-shaped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More