Cooperative location method based on EKF (Extended Kalman Filter) and PF (Particle Filter) under nonlinear and non-Gaussian condition
A co-location, non-linear technology, applied in positioning, electrical components, wireless communication, etc., can solve problems such as divergence, large amount of calculation, and unstable filtering.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
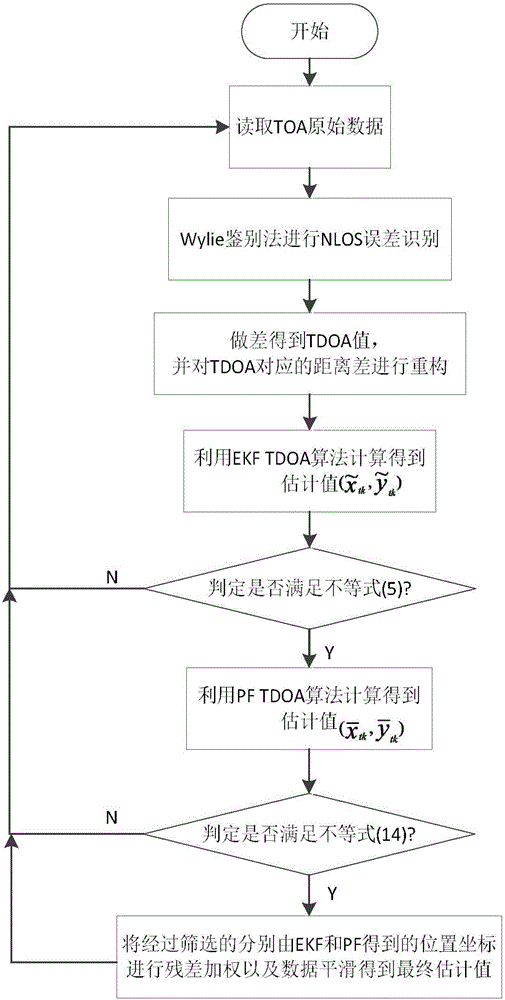
[0088] The invention relates to the technical field of indoor positioning and tracking, specifically a collaborative positioning method based on EKF and PF under nonlinear and non-Gaussian conditions, which reduces the NLOS error and combines the advantages of EKF and PF to overcome the problem of using one of the algorithms alone lack of.
[0089] The present invention will be further described below in conjunction with the accompanying drawings.
[0090] CSS (Chirp Spread Spectrum, Chirp Spread Spectrum) is a wireless communication technology developed based on the IEEE802.15.4a protocol. The positioning experiment platform of the present invention adopts the nanoLOC Development kit3.0 development kit of Nanotron Company, which is based on the nanoLOC TRX radio frequency chip and can be used to develop wireless applications such as communication, ranging, and positioning based on CSS technology. The present invention will use this set of development kits to construct the posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More