Minimally invasive surgical instrument with flexible wrist part
A minimally invasive surgery and wrist technology, applied in the field of minimally invasive surgical medical equipment, can solve the problems of small working space, insufficient operating force, difficult to operate movements, etc., and achieve the effect of easy control, large operating force and flexible movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
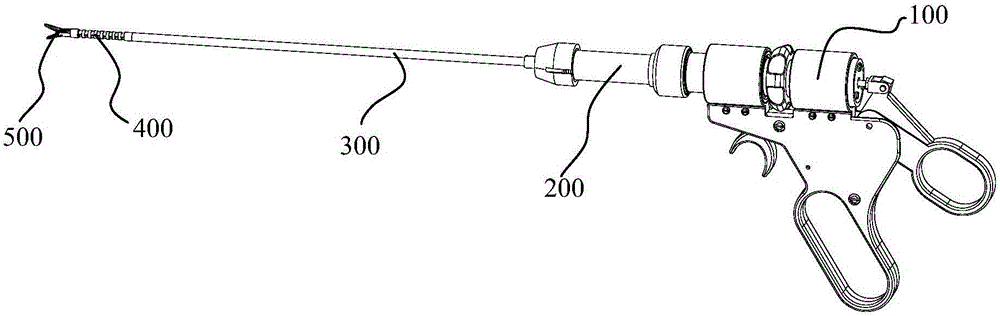
[0030] as attached figure 1 The minimally invasive surgical instrument with a flexible wrist of the present invention shown includes: an operating handle 100, a wrist driving device 200, a rigid straight catheter 300, a flexible wrist 400, and an end effector 500, which as a whole can be applied to the abdominal cavity, chest cavity, etc. , Urology, gynecology and other fields of minimally invasive surgery. During the operation process, the minimally invasive surgical intelligent instrument passes through the poking hole on the patient's body surface, and the doctor holds the instrument and enters the body to perform the operation.
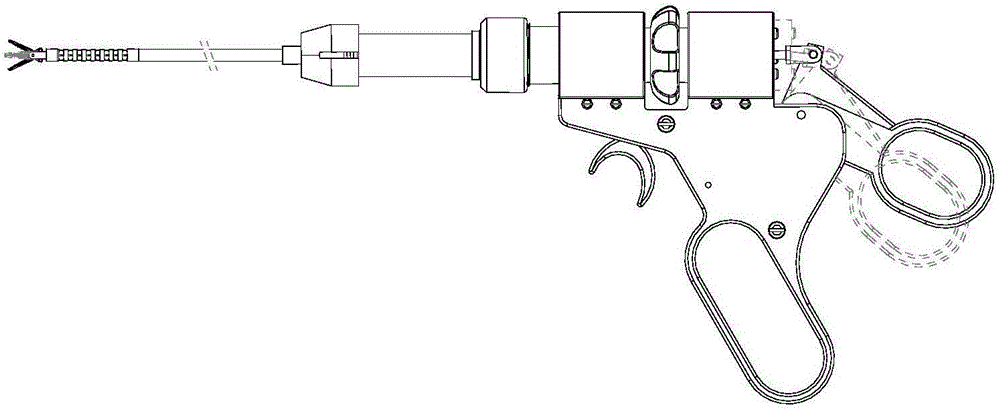
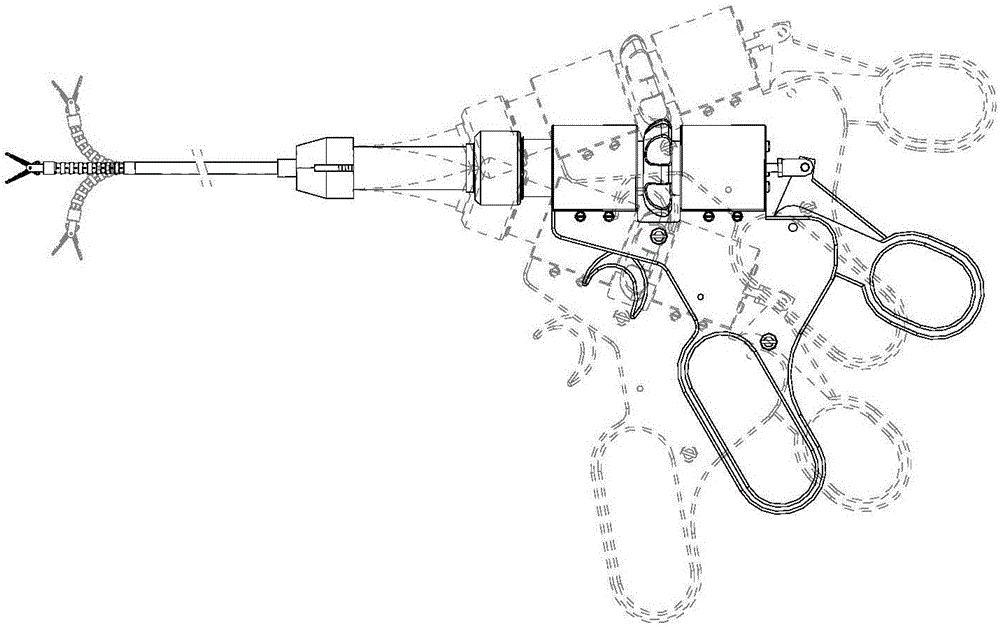
[0031] control Figure 2a , Figure 2b , Figure 2c , Figure 2d , the minimally invasive surgical instrument with a flexible wrist is held by a doctor, which can realize all operations of ordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More