

Cloud robot distributed control system and method based on dynamic Agent
A distributed control and robotics technology, applied in the field of robotics and cloud computing, can solve the problems of poor robot scalability, huge storage and computing pressure, difficult to deal with uncertain tasks and changeable environments, etc., to save computing resources and The effect of storage resources, expansion capabilities, and improved computing capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the purpose, technical solution and main points of the present invention clearer, the specific implementation manners of the present invention will be further elaborated below in conjunction with the accompanying drawings. Obviously, when set forth, the described examples are only some examples of the invention. Based on the examples of the present invention, all other examples obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
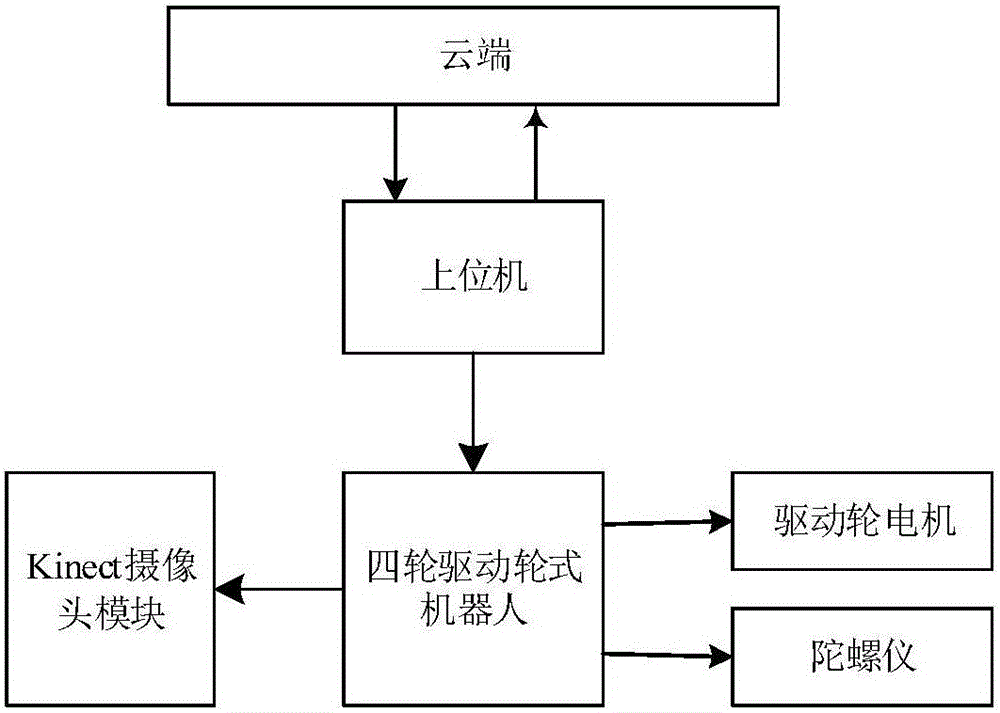
[0026] The cloud robot in this embodiment adopts a four-wheel drive wheeled robot, and the hardware control structure of the robot is as follows: figure 2 As shown, the motion control module is composed of a driving wheel motor and a gyroscope; the information collection module uses a Kinect camera module and is controlled by a host computer equipped with a ROS operating system.
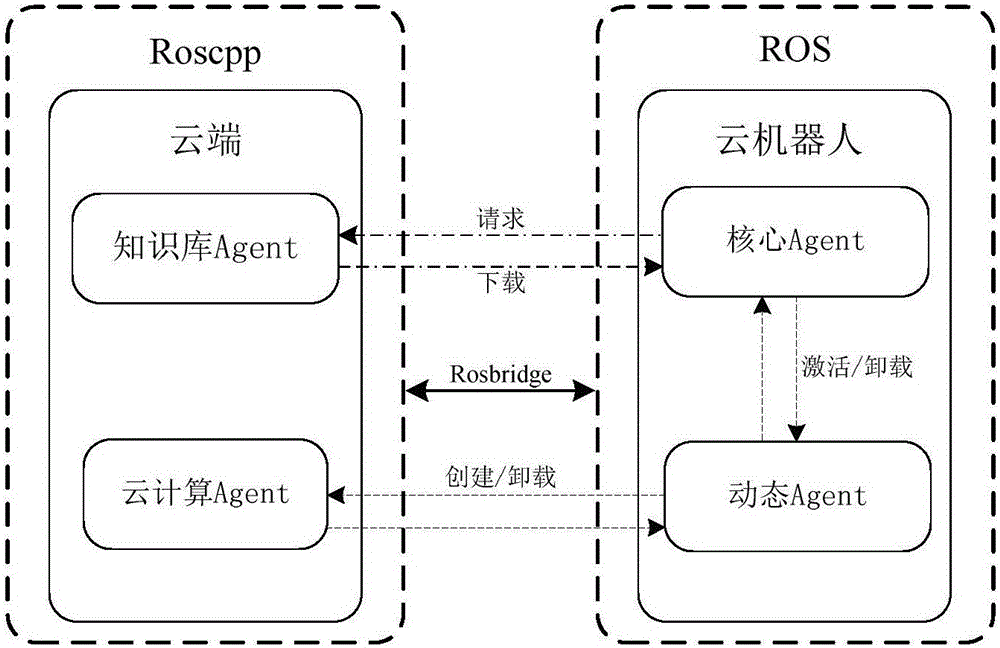
[0027] A distributed control system for cloud robots based o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More