

Glass curtain wall cleaning robot capable of crossing obstacles
A technology for cleaning robots and glass curtain walls, applied in cleaning machinery, cleaning equipment, machine parts, etc., can solve the problems of poor obstacle surmounting ability, increasing complexity and cost, and being difficult to popularize, so as to solve the problems of poor obstacle surmounting ability and good obstacle surmounting ability. The effect of promoting and using value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
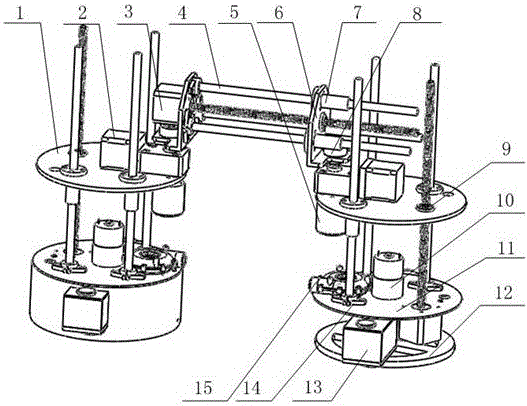
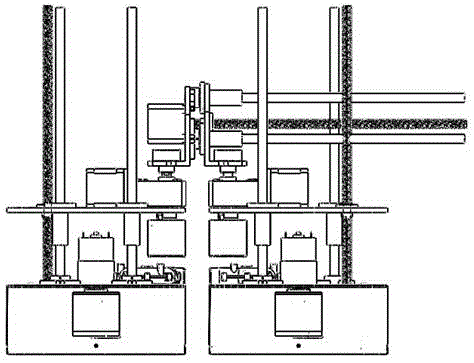
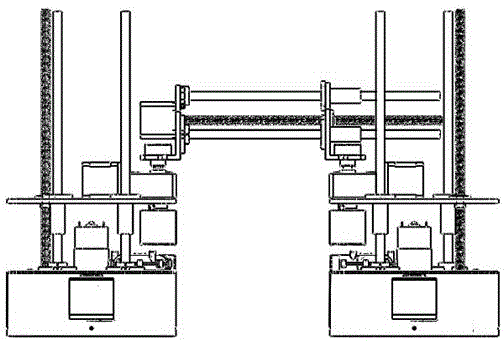
[0025] combine figure 1 -8 The present invention is further described in detail.
[0026] The cleaning robot consists of two suction devices consisting of a vacuum pump (8) and two suction cups (9) including a lower end cover (5), a vacuum chamber (6) and an upper end cover (7). Suction cup lifting mechanism composed of (1) and mounting bracket (3), suction cup propulsion mechanism composed of lead screw (1), support rail (2) and mounting bracket (3), 5 stepping motors (13), 2 pcs DC motor (11), 2 encoders (12), water tank (4) and safety rope (10), such as figure 1 shown.
[0027] figure 2 It is a schematic diagram of the robot’s walking and wiping trajectory. (a) is the overall wiping trajectory diagram, which clearly expresses that the cleaning robot wipes from top to bottom and from left to right when cleaning the wall. (b) is the local wiping trajectory of the robot. Figure, wipe in a spiral trajectory. The wiping track can save energy and improve wiping efficiency. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More