Method for tracking movement mother ship by UUV (Unmanned Underwater Vehicle) based on nonlinear model predictive control
A nonlinear model, predictive control technology, applied in non-electric variable control, vehicle position/route/altitude control, altitude or depth control, etc., can solve the problem of low accuracy, enhance rapidity and reduce cumulative effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0027] Specific implementation mode one: combine Figure 1 to Figure 3 To describe this embodiment,
[0028] A method for tracking a moving mother ship by a UUV based on nonlinear model predictive control, comprising the steps of:
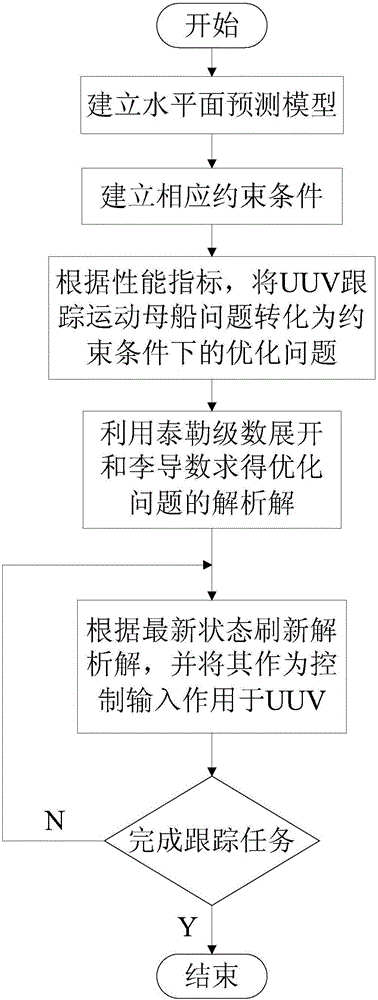
[0029] Step 1: Establish a prediction model for the underactuated UUV level;
[0030] Step 2: According to the actual situation, establish the corresponding constraints of the prediction model of the UUV horizontal plane;
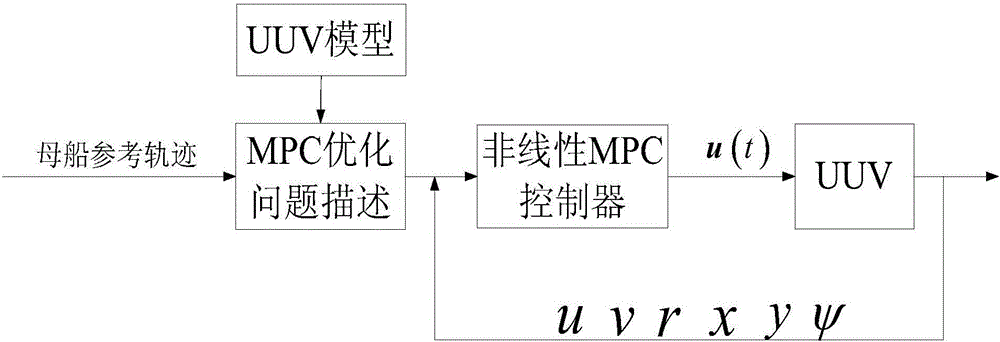
[0031] Step 3: Select the comprehensive performance index, and convert the tracking control problem of the underactuated UUV to the moving mother ship into an optimization problem under constraints;
[0032] Step 4: Use Taylor series expansion and Lie derivatives to process the optimization problem under the constraints in step 3, and use the obtained analytical solution as the control input of the UUV tracking system;
[0033] Step 5: In each prediction time domain, update the analytical solution in step 4 with the new state...
specific Embodiment approach 2
[0034] The specific process of establishing the prediction model of the underdriven UUV level described in step one of the present embodiment is as follows:
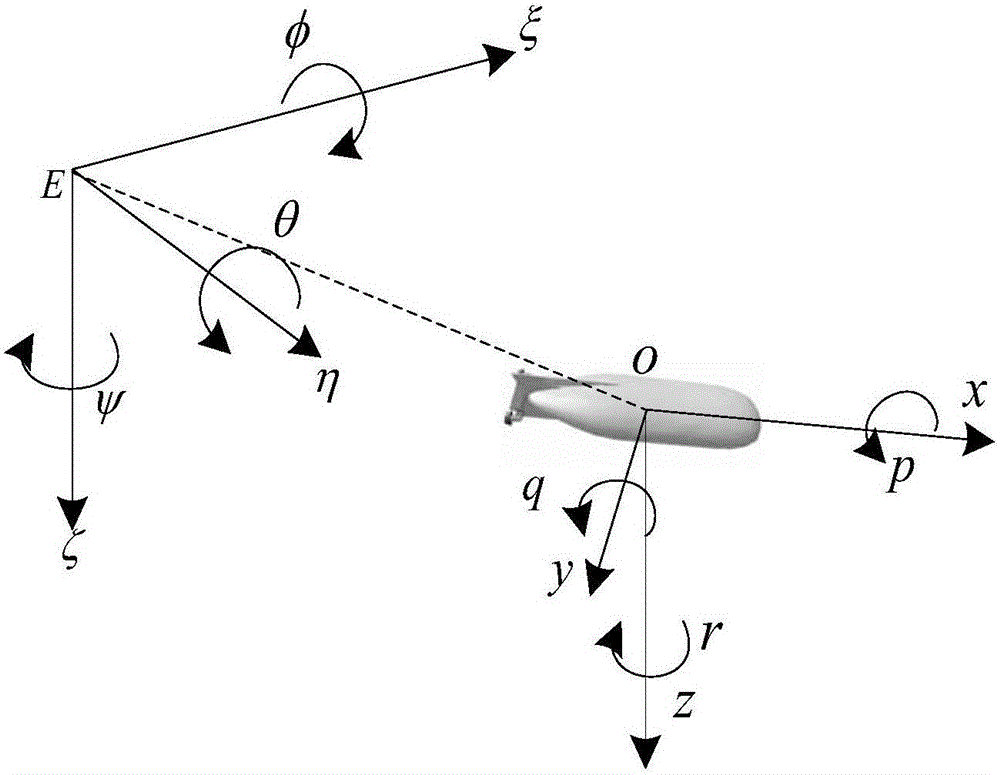
[0035] combine figure 1 , the coordinate system of UUV is established, E-ξηζ is a fixed coordinate system, O-XYZ is a moving coordinate system; the origin of the fixed coordinate system E-ξηζ is a point on the earth or the ocean, and Eξ is kept horizontal and points to the geographic north. is the main heading of the UUV; Eη points to the geographical east, representing the horizontal direction of the UUV; Eζ points to the center of the earth, representing the vertical direction of the UUV; the motion coordinate system O-XYZ is placed on the UUV and moves with it, and its origin O is set to at the position of the UUV center of gravity; Ox points to the forward direction of the UUV as positive, and rotates around Ox to generate a roll angular velocity p, forming a roll angle φ; Oy points to the starboard direction of the ...
specific Embodiment approach 3
[0047] The corresponding constraints of the prediction model of the UUV horizontal plane described in step 2 of this embodiment are as follows:
[0048] For the UUV horizontal plane prediction model, in a certain prediction time domain [t,t+T], the constraints will be satisfied:
[0049]
[0050] Where τ is a time variable, and τ∈[0,T]; is the predicted value of the state variable of the UUV in the time domain [t,t+T]; is the predicted value of the UUV trajectory in the time domain [t,t+T]; Control input for UUV in the time domain [t,t+T];
[0051] At the same time, in the [t,t+T] prediction time domain, the predicted value of the state variable The initial value of satisfies:
[0052]
[0053] Among them, t represents the moment, and T represents the time in the prediction time domain.
[0054] Other steps and parameters are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More