

Intelligent robot-oriented man-machine interaction method and intelligent robot-oriented man-machine interaction device
An intelligent robot and human-computer interaction technology, applied in the field of robotics, can solve problems such as insufficient smoothness, affect the user experience of intelligent robots, and monotonous interaction process, achieve accurate behavior analysis and prediction, improve user experience and user stickiness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
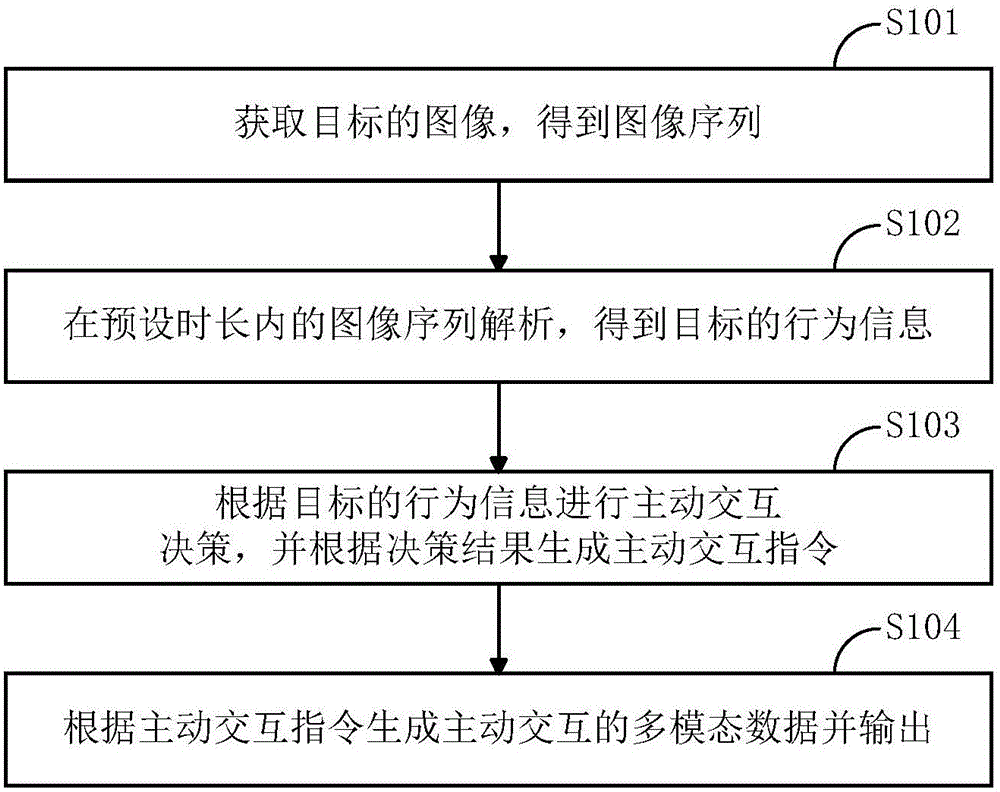
[0042] figure 1 A flow chart of the intelligent robot-oriented human-computer interaction method provided by this embodiment is shown.
[0043] Such as figure 1 As shown, in this embodiment, the method first acquires an image of the target in step S101, thereby obtaining an image sequence. Specifically, in this embodiment, the method preferably uses a camera configured by the intelligent robot to acquire images. When the intelligent robot is turned on, the method continuously captures images through the camera, so as to obtain the image sequence of the target.
[0044] It should be pointed out that, in this embodiment, preferably, even if the intelligent robot is turned on but not awakened, the method can still continue to capture images through an image acquisition device such as a camera. Of course, in other embodiments of the present invention, the method may also use other reasonable ways to acquire the image sequence of the target, and the present invention is not limi...
Embodiment 2
[0063] Figure 5 A flow chart of the intelligent robot-oriented human-computer interaction method provided by this embodiment is shown.
[0064] Such as Figure 5 As shown, the method provided by this embodiment first acquires an image of the target in step S501 to obtain an image sequence of the target. Specifically, the implementation principle and implementation process of the method for acquiring the image sequence of the target are similar to the content involved in step S101 in the first embodiment, so details are not repeated here.
[0065] After the image sequence of the target is obtained, the method uses the target's daily behavior pattern to analyze the image sequence obtained in step S501 in step S502, so as to obtain the behavior trend of the target. Specifically, the target daily behavior pattern used in this embodiment is obtained through training using collected target daily behavior data.
[0066] In this embodiment, the daily behavior pattern of the target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More