

Automatic extraction technology of street lamp poles based on vehicle laser scanning point clouds
A vehicle-mounted laser scanning and automatic extraction technology, applied in the field of intelligent transportation system and smart city construction, can solve the problem of insufficient degree of algorithm automation, and achieve the effect of good robustness and low time complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
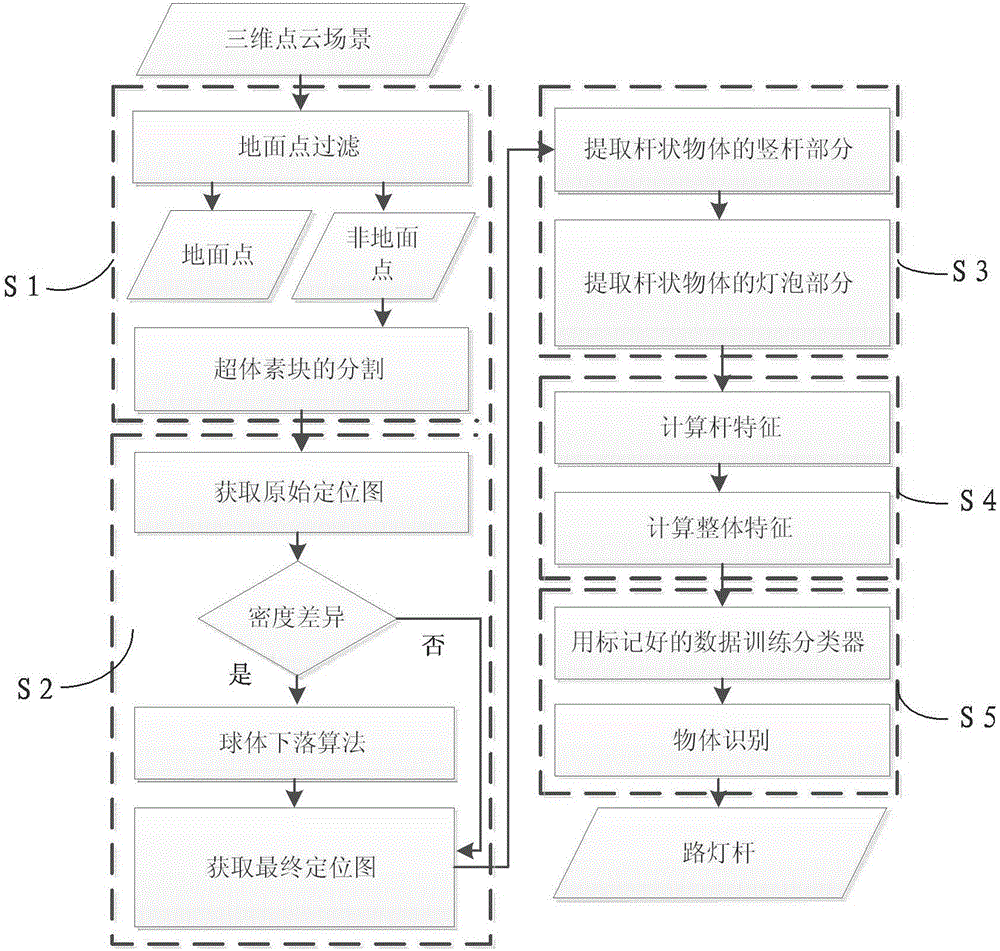
[0037] The implementation steps of the automatic extraction technology based on the mobile vehicle laser scanning point cloud street light pole proposed by the present invention are as follows:
[0038] S1. Preprocessing for filtering ground points and dividing non-ground points into supervoxel sets
[0039] S11. According to the driving trajectory data collected by the vehicle-mounted laser scanning system, the original point cloud is divided into segments along the direction of the road;
[0040] S12. For each segment of point cloud data, use a method based on RANSAC (Random Sampling Consensus Algorithm) to filter ground points. The average height of the inner cluster point set obtained by the first plane fitting is taken as the average height of the ground points. Next, in each iteration of plane fitting, calculate the distance between the unclassified points in the fitted inner group point set and the fitting plane. If the distance is less than the preset threshold, the unc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More