

Bionic flexible drive robot based on magnetic repulsive force
A robot and magnetic repulsion technology, applied in the field of robotics, can solve the problems of large structure, inability to form a trajectory, and limited application scope, and achieve the effect of simple system structure, strong passability, and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
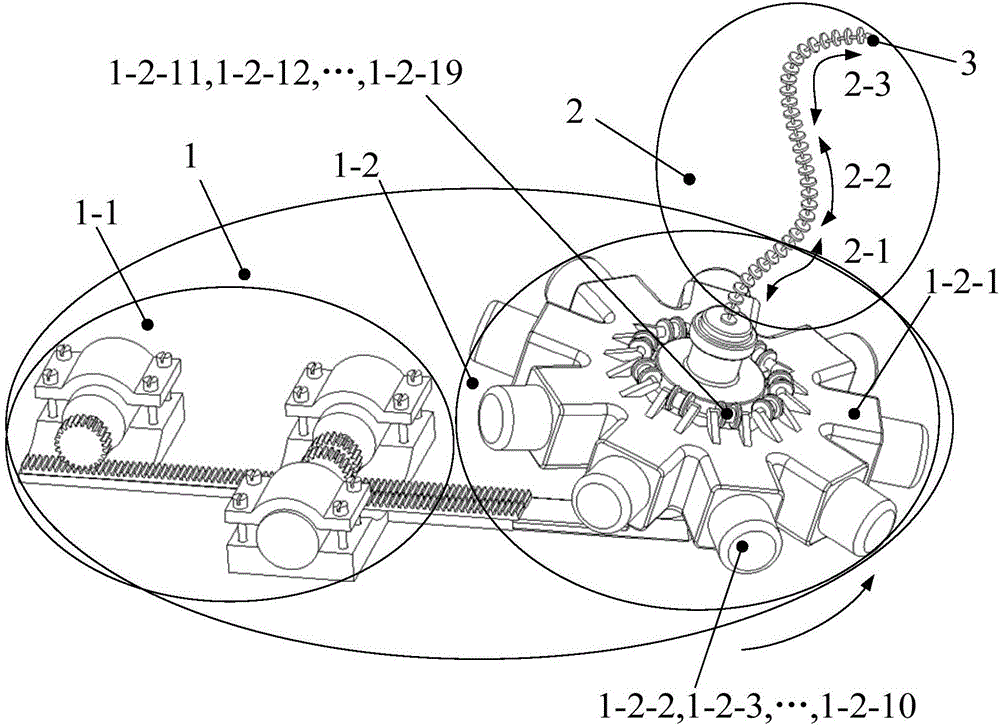
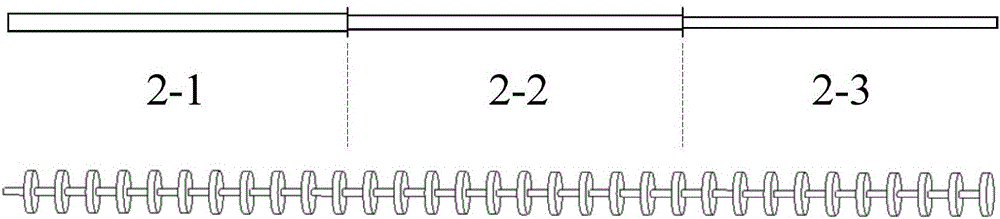
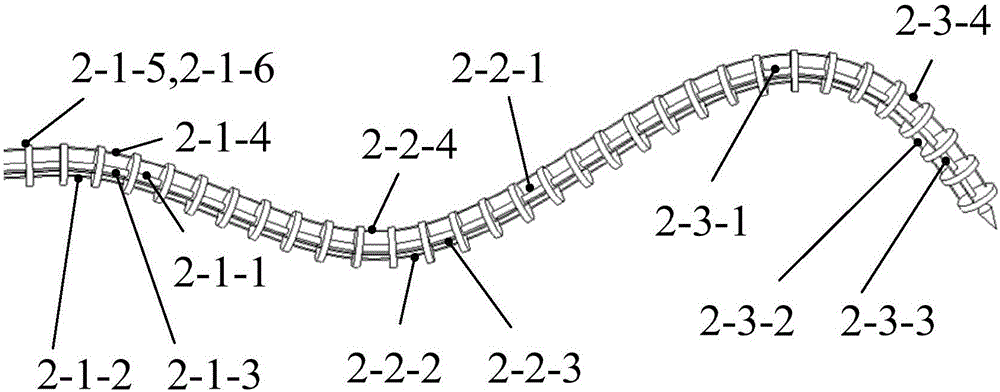
[0032] like figure 1 As shown, a biomimetic flexible driving robot based on magnetic repulsion in the present invention is mainly composed of a driving mechanism 1 (including a base joint extension drive mechanism 1-1 and a base joint bending drive mechanism 1-2), a spine-tendon 2 ( Contains a plurality of base sections 2-i that are bendable, relatively expandable, and compressible, where i=1, 2,...,n, where n is the number of base sections, n≥3, figure 1 It is a special case of n=3 in the actual application, and the value of n can be changed according to the needs), and the end effector 3 (for the operating mechanism or sensor, etc.). Among them, the base joint extension driving mechanism 1-1 is used to change the relative position of the base joints 2-i, the base joint bending drive mechanism 1-2 is used to drive the base joint bending movement, and the base joint extension driving mechanism 1-i 1 and base joint bending drive mechanism 1-2, changing the length and terminal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More