

Bionic power transmission line inspection robot and obstacle crossing method thereof
A line inspection robot and robot technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of low continuous line inspection ability, weak adaptability to climbing and overcoming obstacles, etc., to improve continuous cruising ability, improve obstacle avoidance effect, The effect of improving line patrol efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further introduced below in conjunction with the accompanying drawings.
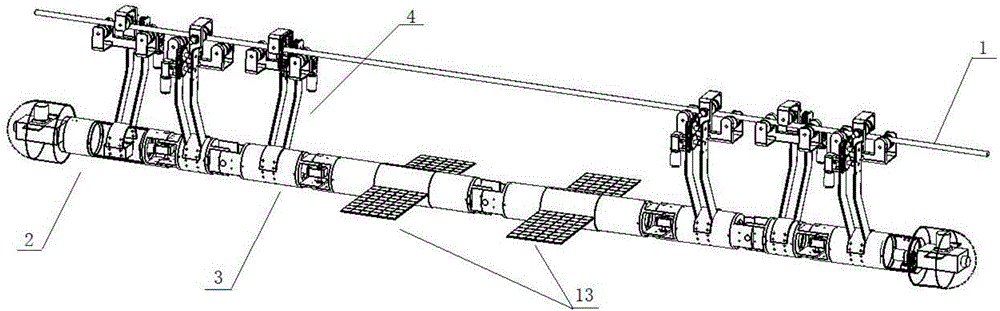
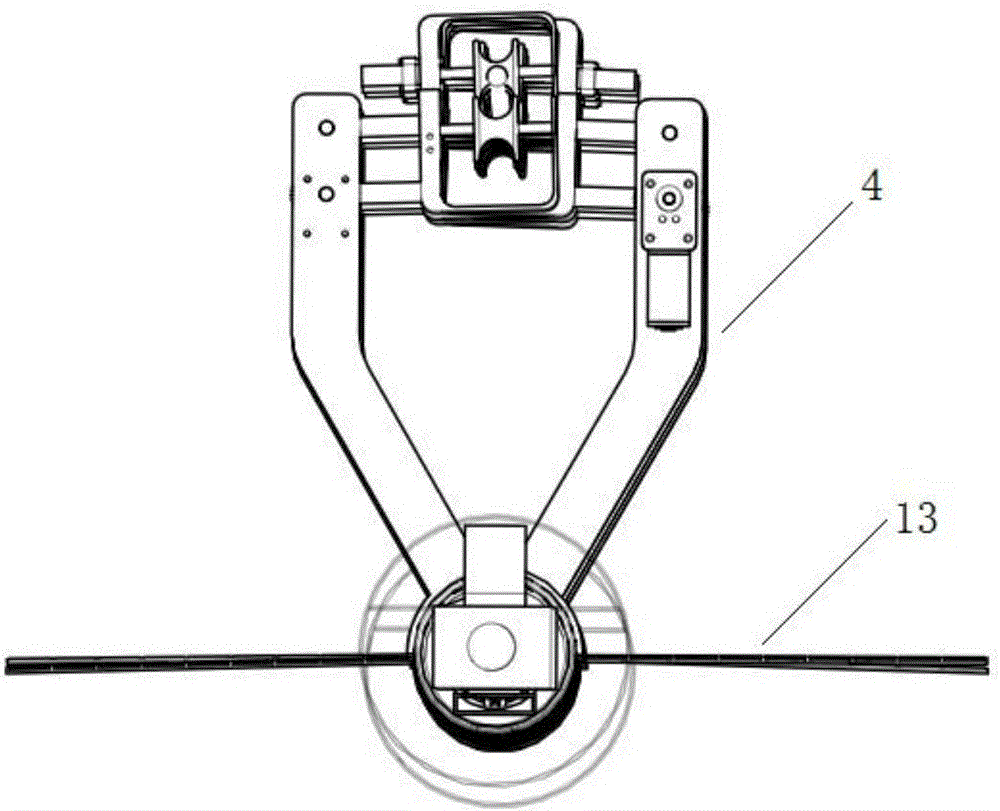
[0057] like figure 1 Shown is a schematic diagram of the overall structure of the present invention, the bionic line patrol robot structure includes a robot unit 2 and a camera unit 12, wherein the robot unit 2 articulated body 3, wire hanger 4 and solar panel 13.
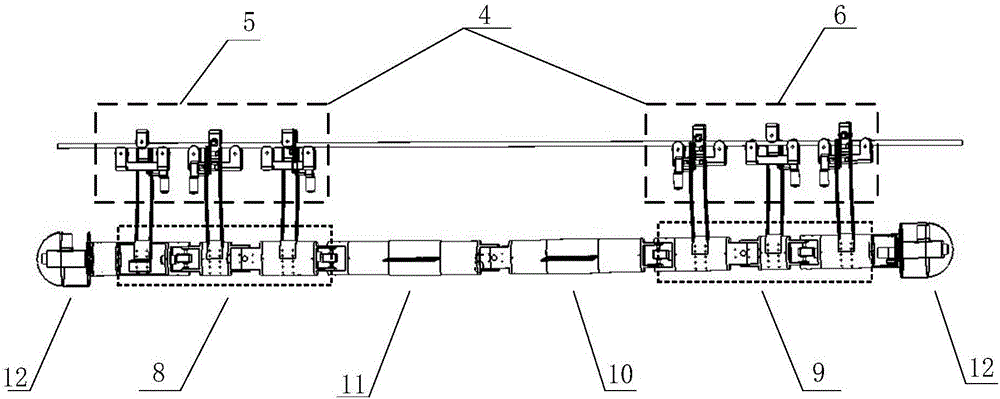
[0058] like figure 2 As shown, the joint body 3 includes n left sub-joints 8, n right sub-joints 9, middle left joint 11, middle right joint 10 and joint rotation axis 36, wherein n is an integer greater than or equal to 3. The joint bodies 3 are connected by joint shafts 37 . like Figure 12 and 13 As shown, the left sub-joint 8 and the right sub-joint 9 include a biaxial worm gear motor 35 and a controller 36; as Figure 15 Each of the middle left joint 11 and the middle right joint 10 contains a storage battery 7 inside, and two solar panels 13 are respectively installed on the outside of the midd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More