A real-time slope sensor for automobiles and its application method
A slope sensor and automotive technology, applied in the field of automotive sensors, can solve the problems of low accuracy and unsuitable for dynamic measurement, and achieve the effects of high accuracy, enhanced driving comfort, and improved dynamic performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
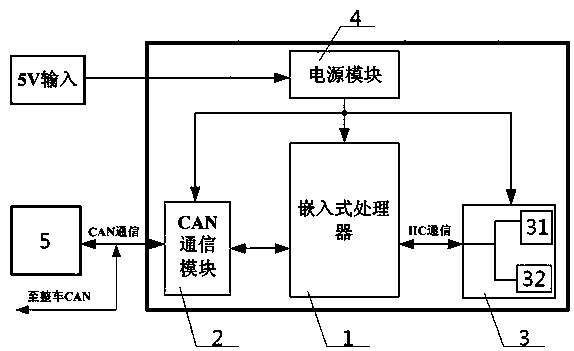
[0050] see figure 1 and figure 2 , a real-time gradient sensor for automobiles, comprising a processor 1, a CAN communication module 2, a motion processing module 3 and a power module 4, the output of the power module 4 is connected to the processor 1, the CAN communication module 2, and the motion processing module 3 The power input end of the processor 1 is electrically connected, the signal input end of the processor 1 is connected with the signal output end of the CAN communication module 2 and the motion processing module 3, and the signal input end of the CAN communication module 2 is connected with the vehicle speed measuring device 5. connected, and the motion processing module 3 includes a chip and an accelerometer 31 and a gyroscope 32 integrated thereon.
[0051] A method for using the real-time gradient sensor for the above-mentioned automobile, the method for using may further comprise the steps:
[0052] The first step: the processor 1 first reads the vehicle ...
Embodiment 2
[0056] Basic content is the same as embodiment 1, the difference is:
[0057] The CAN communication module 2 is signal-connected to the vehicle speed measuring device 5 through the CAN bus, and the processor 1 is signal-connected to the motion processing module 3 through the IIC bus. The vehicle speed measuring device 5 is a gearbox control unit. The processor 1 is an embedded processor, and the model of the chip it adopts is STM32F103; the model of the chip adopted in the motion processing module 3 is MPU6050. The input voltage of the power module 4 is 5 volts, and the output voltage is 3.3 volts.
Embodiment 3
[0059] Basic content is the same as embodiment 1, the difference is:
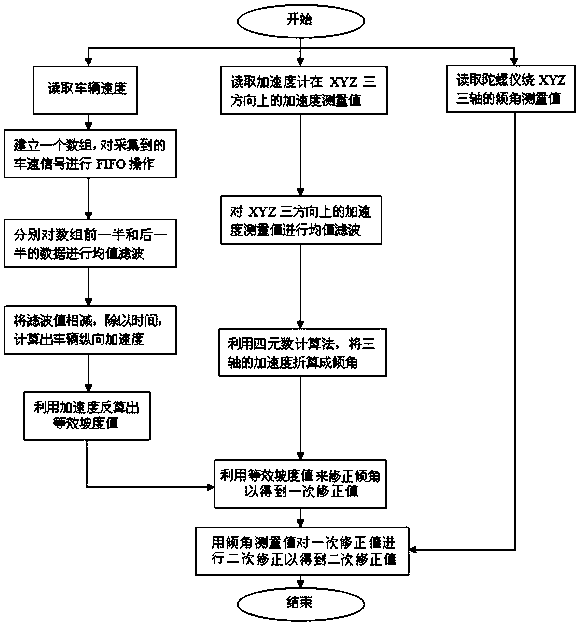
[0060] In the first step, the processing of the collected vehicle speed signal to obtain the equivalent slope value refers to: the processor 1 first establishes an array according to the collected vehicle speed signal, and a vehicle speed signal corresponds to a data in the array, And perform FIFO operation on the data in the array, and then perform mean filtering on the first half and the second half of the data in the array respectively, then subtract the two filter values obtained, and then divide by time to calculate the longitudinal acceleration of the vehicle, and then Use the vehicle longitudinal acceleration to back calculate the equivalent slope value.
[0061] The FIFO operation of the data in the array refers to: using the collected vehicle speed signal as data, the data is stored in the array in order, and each time a new data is received, the data in the array is moved forward one bit, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



