

Hand posture estimation method based on depth information and calibration method
A correction method and depth information technology, applied in the field of robot vision, can solve problems such as occlusion, the difficulty of completely segmenting the hand area, and the inability to express various gestures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
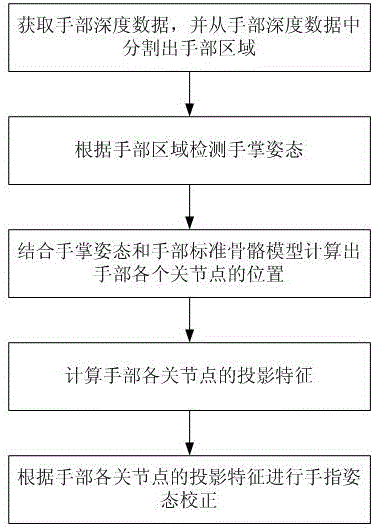
[0077] Such as figure 1 and figure 2 As shown, a hand pose estimation method based on depth information and correction method includes the following steps:
[0078] S1. Obtain hand depth data, and segment hand regions from the hand depth data.
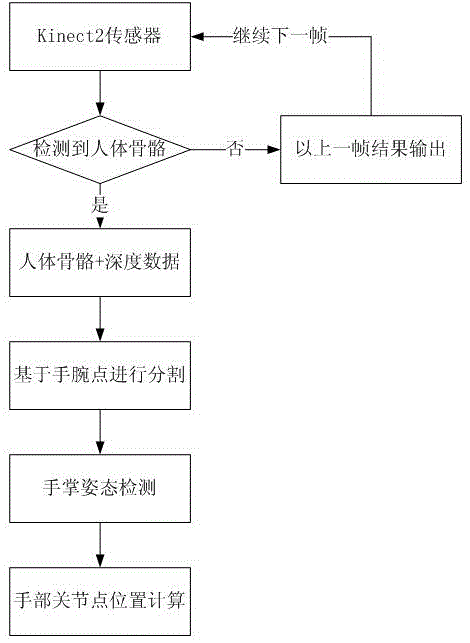
[0079] This embodiment is mainly based on depth data, and its purpose is to estimate the posture state of the hand in the depth data. This implementation uses depth data as input. Compared with traditional color cameras, the depth sensor can obtain the distance information of the object to be photographed, and it is easy to segment the target and the background. In this embodiment, the Kinect2 sensor is taken as an example.
[0080] The step S1 includes the following sub-steps:
[0081] S11. Ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More