

Method for determining timing of capturing tumbling target by free floating space robot
A technology of space robot and determination method, which is applied in the control, instrument, special data processing application of finding targets, etc., can solve the problem of space utilization without space robot, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
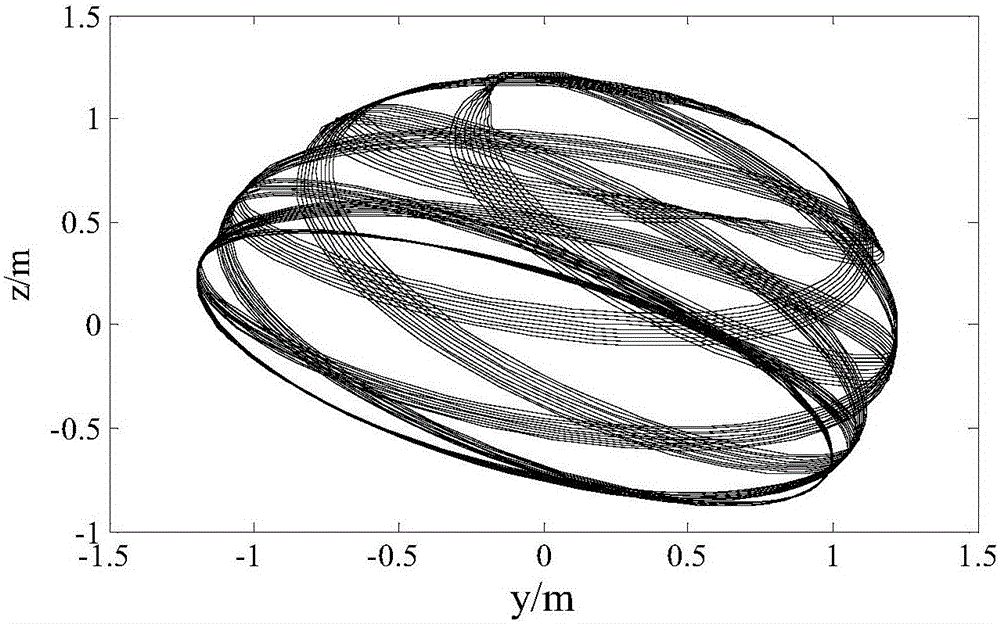
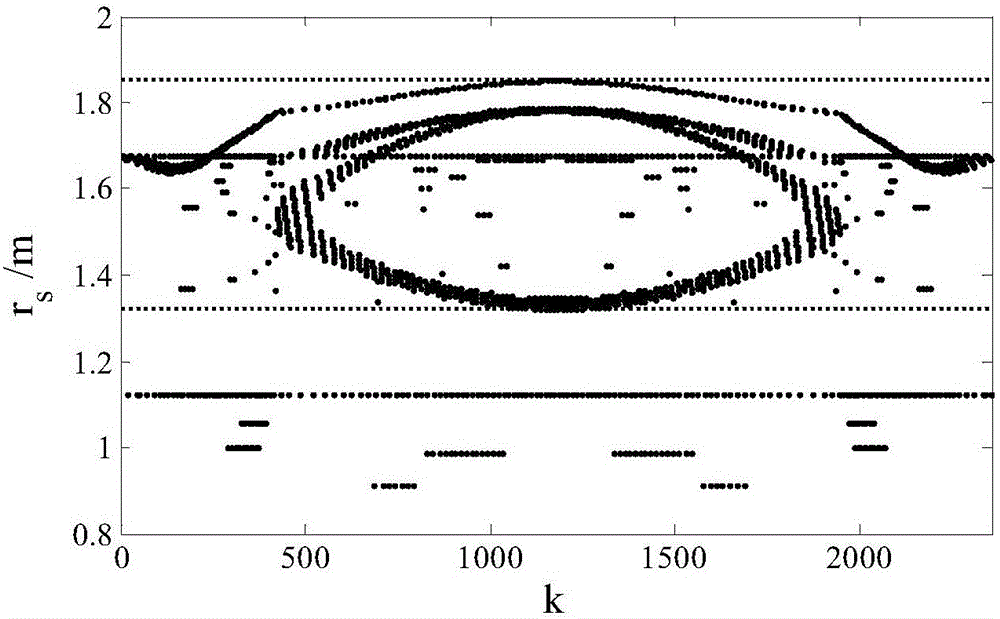
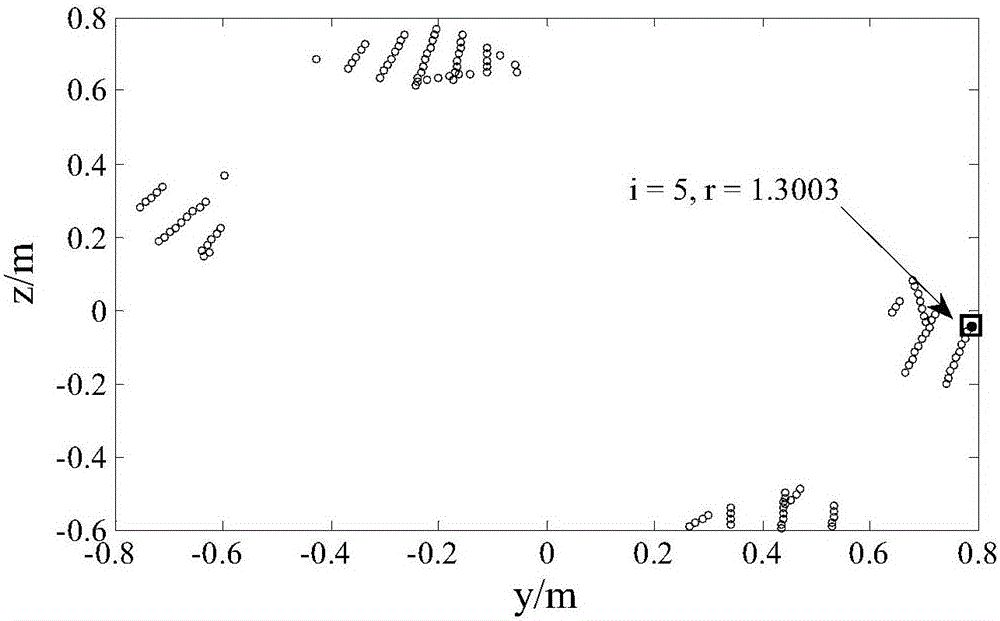
[0082] Taking a space robot with a three-degree-of-freedom manipulator capturing a tumbling target as an example, the effectiveness of the timing determination method in the present invention is illustrated. The moment of inertia of the rolling target is:
[0083] I = 50.3 0 0 0 105.18 0 0 0 105.97 k g · m 2
[0084] In the body coordinate system, the position vector of the capture point is Assuming that at the initial moment, the three axial components of the target's rotation speed in the body coordinate sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More