

a snake robot
A snake-like robot and driving mechanism technology, applied in the field of robotics, can solve problems such as complex installation, low transmission precision, and complex joint steering structure, and achieve the effects of reducing installation difficulty, improving transmission accuracy, and reducing transmission errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the technical problems, technical solutions and beneficial effects solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
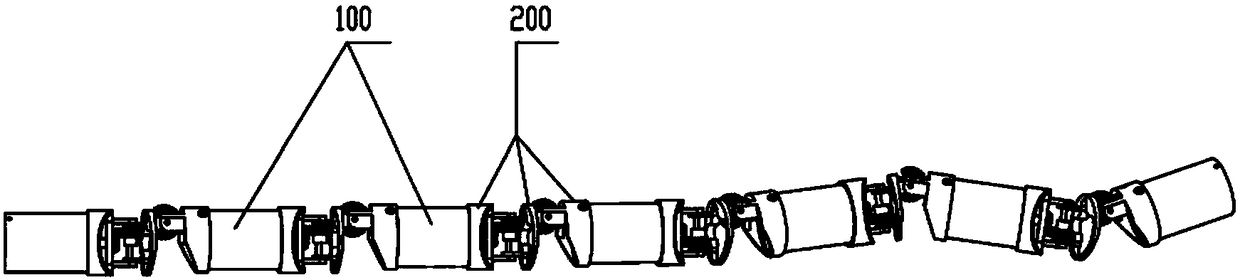
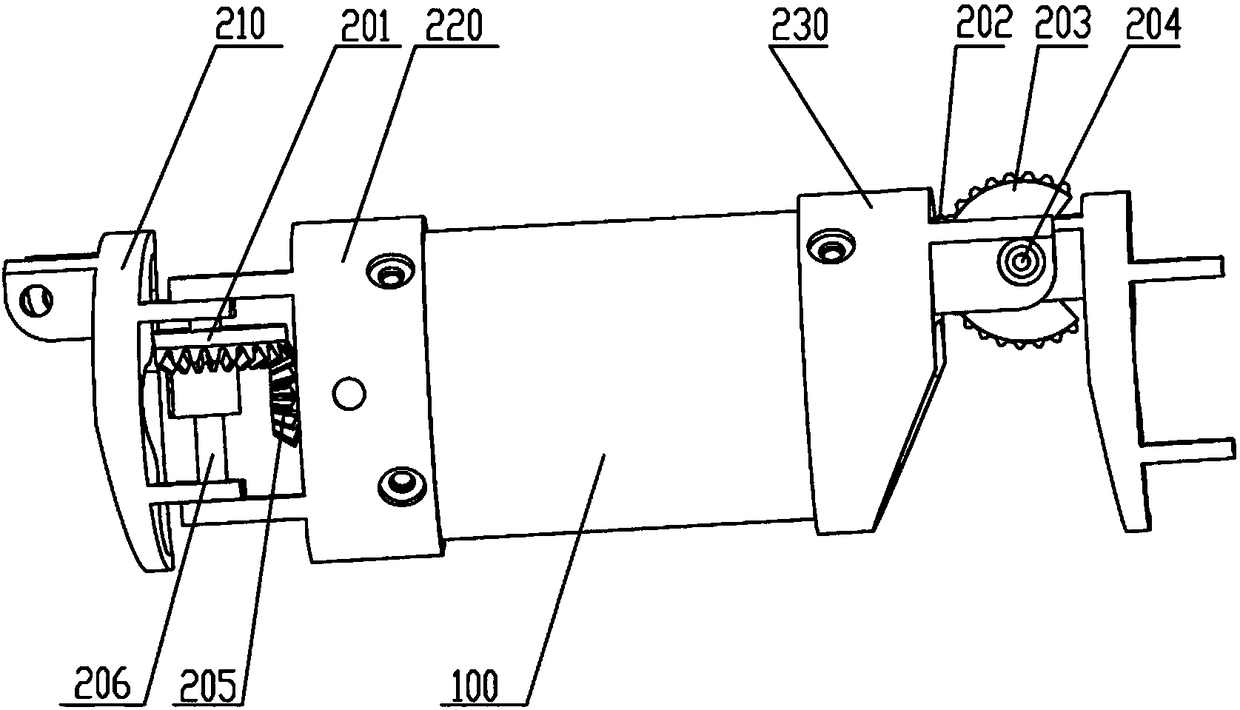
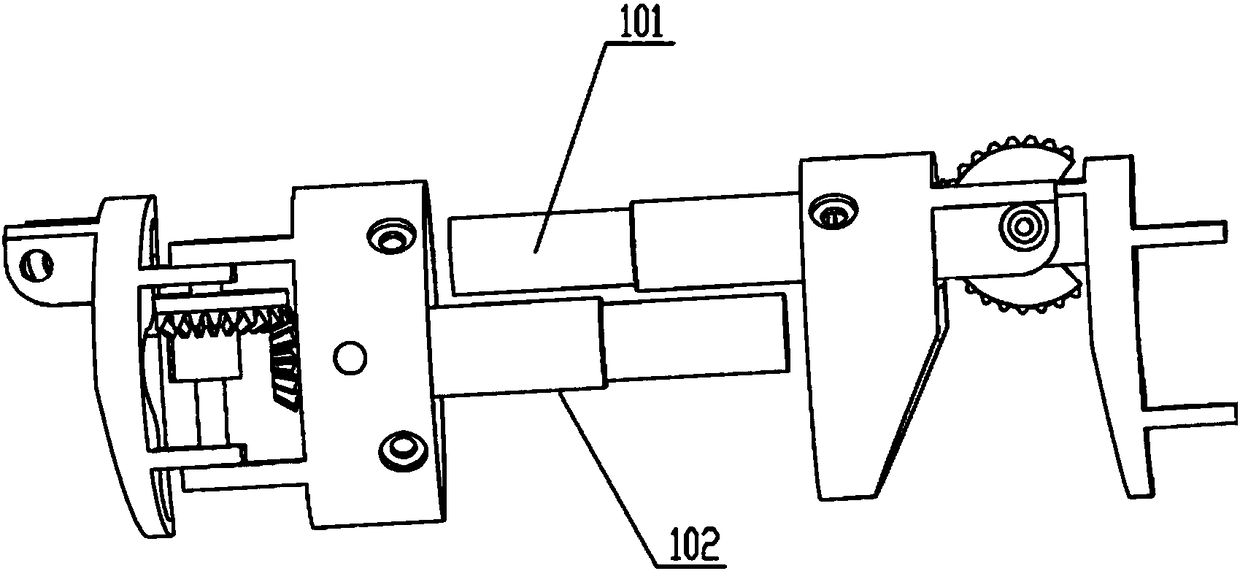
[0034] combine figure 1 , figure 2 and image 3 As shown, the embodiment of the present invention provides a snake robot, including a plurality of main body modules 100 and joint modules 200, and also includes a drive control module (not shown in the figure), every two adjacent main body modules 100 pass through A joint module 200 is connected.
[0035] The joint module 200 includes a joint swing arm 210, and the drive control module is used to drive at least one joint swing arm 210 to swing relative to the preceding main body module 100 connected thereto, and / or dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More