

High-precision motion platform-based multi-camera calibration method
A motion platform and calibration method technology, applied in the field of multi-camera systems, can solve the problems of difficult design of calibration objects, lack of universality, low parameter accuracy, etc., achieve high-precision measurement and automatic control capabilities, improve work efficiency, and achieve accurate calibration results Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
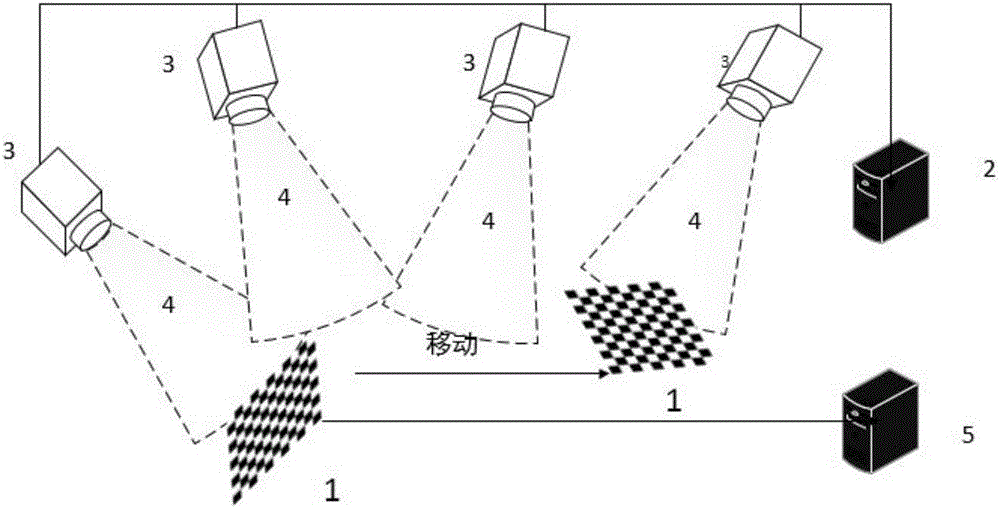
[0041] Multi-camera systems typically require cameras or cameras to capture objects from multiple angles. When the images of the object or person to be reconstructed are viewed from different angles at the same time, the 3D information of the object or person to be reconstructed can be calculated by using the calibration results of the multi-camera system to achieve goals such as motion capture. Therefore calibration is the most basic and important step of the system. The camera layout structure of the present invention can adopt a general multi-camera system structure, and there is no special requirement for the installation position and posture of the multi-camera; figure 1 As shown, the layout diagram of the multi-camera system calibration system in this preferred example, the moving rang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More