

Base hinge point position self-adjusting six-degree-of-freedom neck part flexible exoskeleton system
An automatic adjustment, degree of freedom technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of increasing the difficulty and instability of the pose tracking control of virtual reality helmets, affecting the control efficiency of the actuator and the assisting effect, and the existence of Problems such as singular positions to achieve the effect of enhancing the fidelity of use, improving controllability and movement, and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
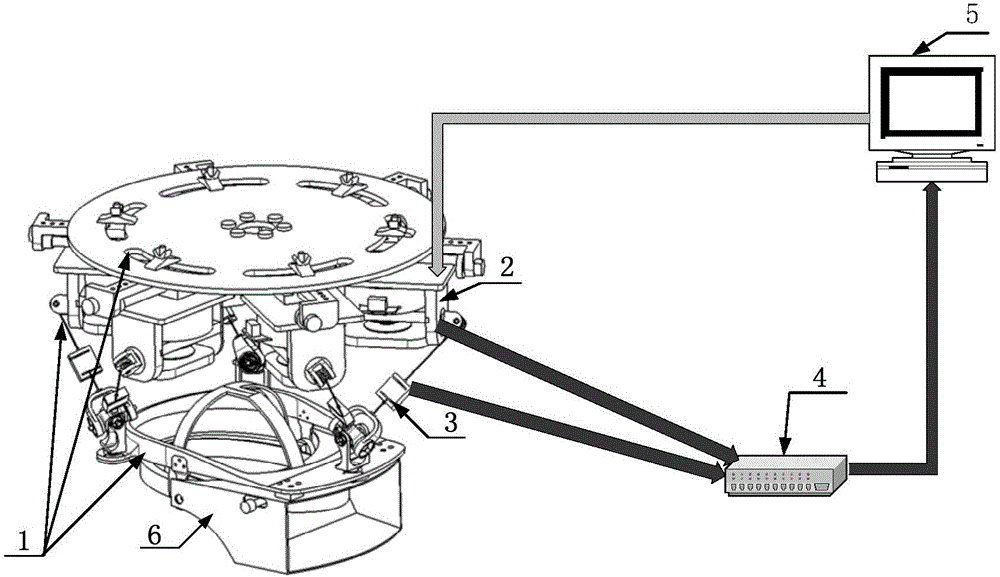
[0038] combine here Figure 1-12 The present invention is described in further detail, wherein the working principle of the system is referred to Figure 12 .
[0039] Such as figure 1 The six-degree-of-freedom head-neck flexible exoskeleton system shown in the base hinge position can be automatically adjusted, mainly composed of six-degree-of-freedom flexible parallel mechanism 1, mechanism drive and joint space motion parameter detection unit 2, and joint space force detection unit 3 , data acquisition and processing unit 4, and control unit 5.
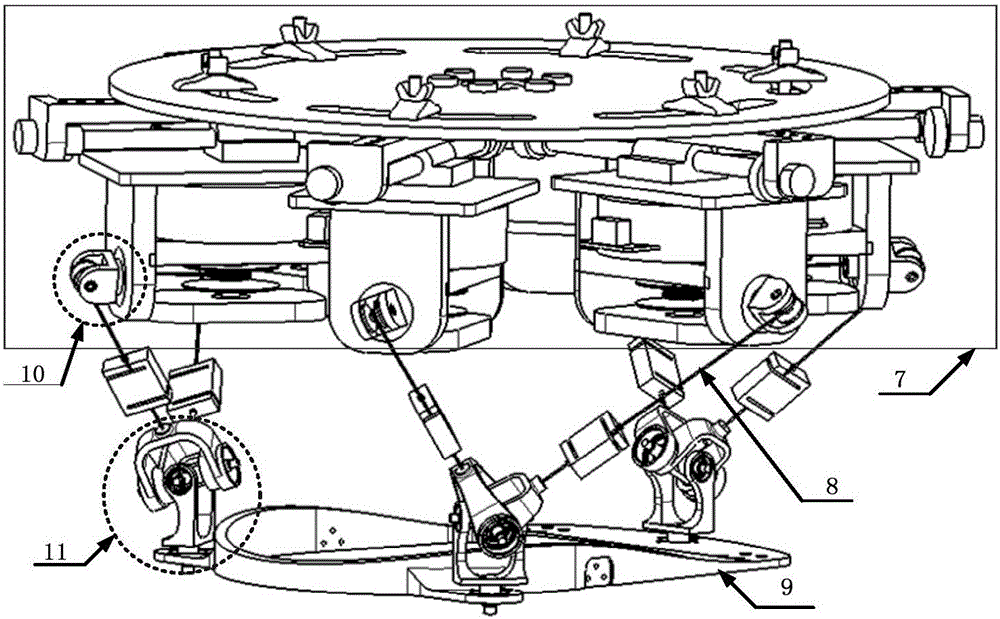
[0040] Such as figure 2 As shown, the six-degree-of-freedom flexible parallel mechanism 1 is mainly composed of a base 7 , six flexible steel cables 8 , and a load installation platform 9 . The base 7 of the six-degree-of-freedom flexible parallel mechanism 1 is used to fix the entire device.
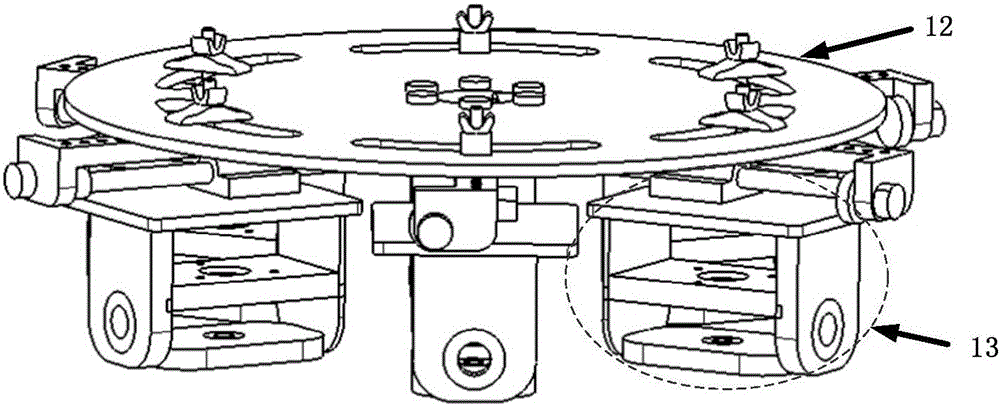
[0041] Such as image 3 , The base 7 is composed of a base base plate 14 , a base hinge position adjustment mechanism 12 and six sets...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More