

Six-degree-of-freedom multi-function loading and transporting robot
A multifunctional and robotic technology, applied in the field of robotics, can solve problems such as insufficient structural rigidity and strength, cumbersome control, and single shape of the gripping head, and achieve the effects of improving anti-overturning ability, high movement flexibility, and convenient adjustment and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments and illustrations.
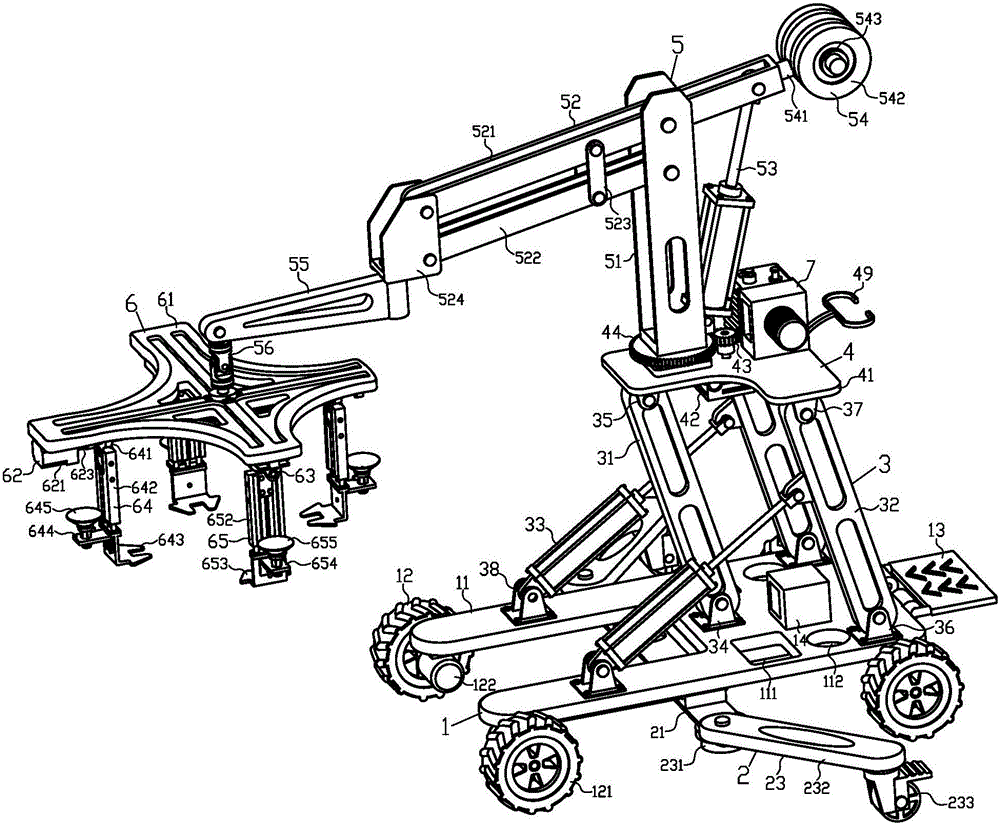
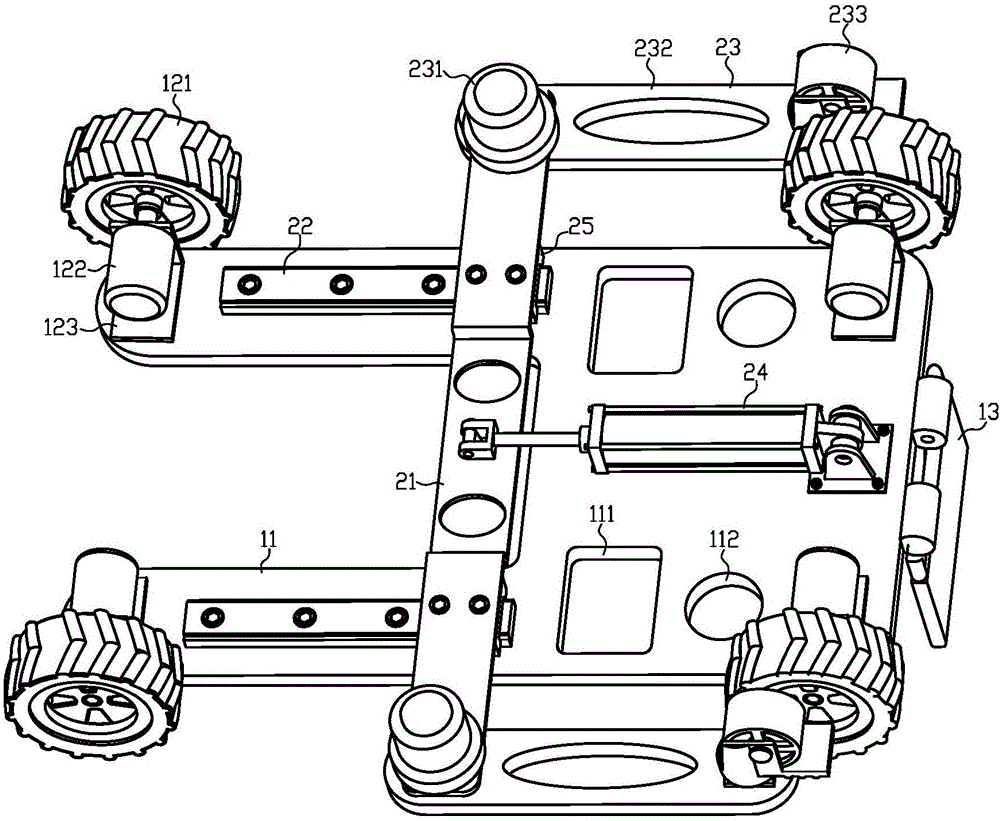
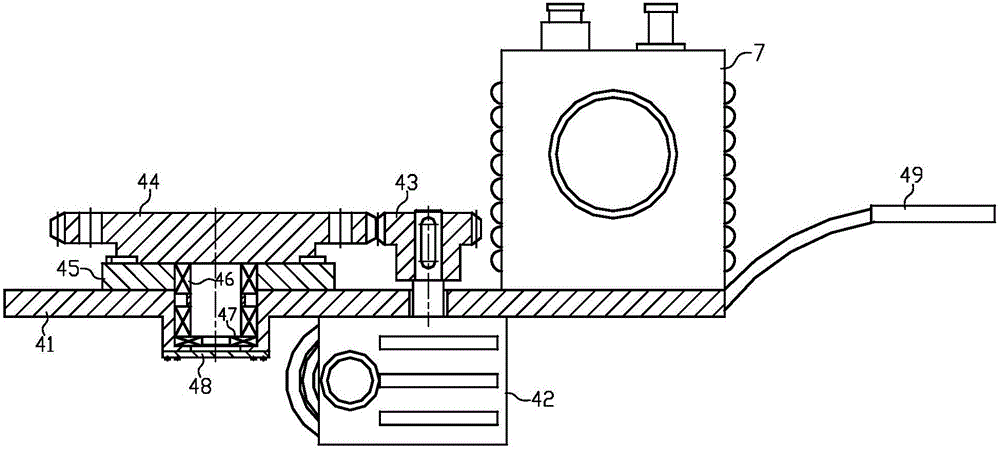
[0031] Such as figure 1 As shown, a six-degree-of-freedom multifunctional shipping robot includes a mobile chassis 1 , an anti-overturning device 2 , an adjustable support base 3 , a slewing device 4 , a motion execution arm 5 , a gripper 6 and an electric air pump 7 . Wherein, the anti-overturning device 2 is installed under the mobile chassis 1 to prevent the present invention from overturning when carrying out the shipping task; In order to adjust the height and front and rear horizontal displacement of the grabber 6, the upper and lower ends of the adjustable support base 3 are respectively fixedly connected with the rotary device 4 and the mobile chassis 1 through screws; the bottom of the motion execution arm 5 is fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More