

Latitude unknown self-aligning method of strapdown inertial navigation system under dynamic interference condition
A strapdown inertial navigation and self-alignment technology, which is applied to navigation, measuring devices, instruments, etc. through speed/acceleration measurement, can solve the problem of inability to accurately obtain the system model, poor Kalman filter effect, and difficulty in knowing the system characteristics and other problems, to achieve the effect of preventing the divergence of filtering results, fast filtering convergence speed, and improving the accuracy of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
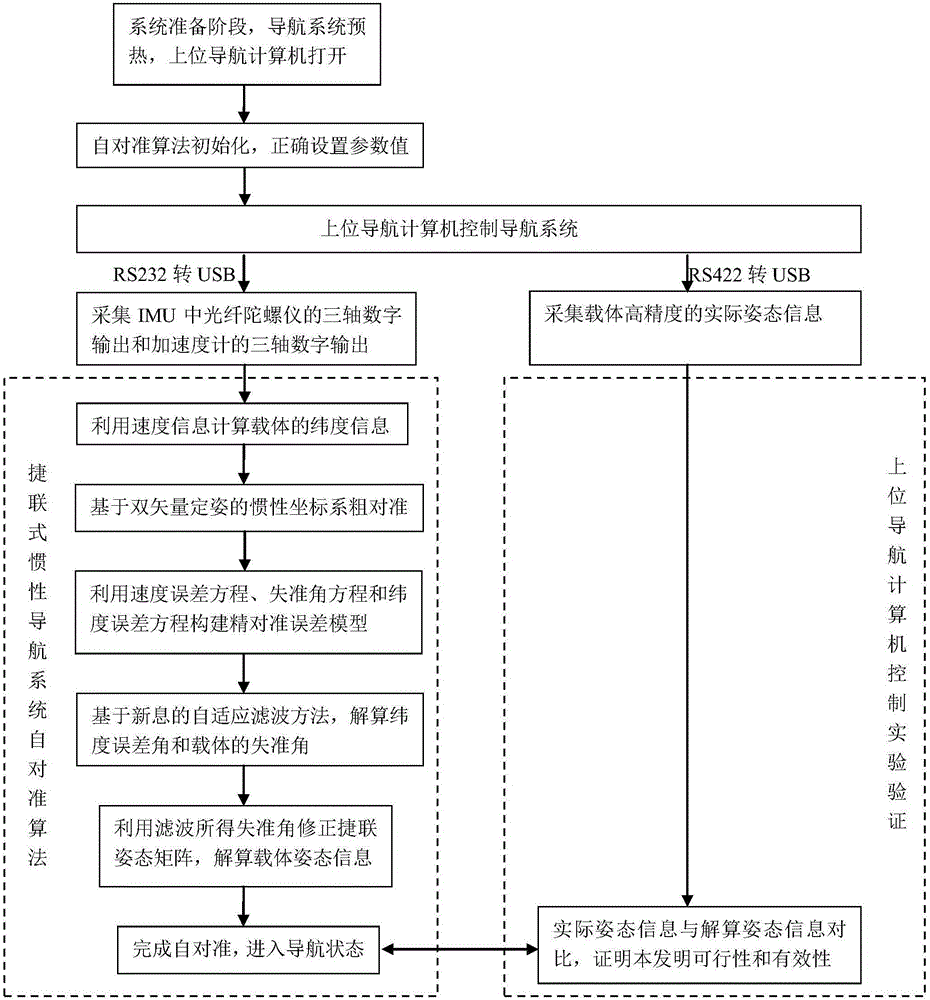
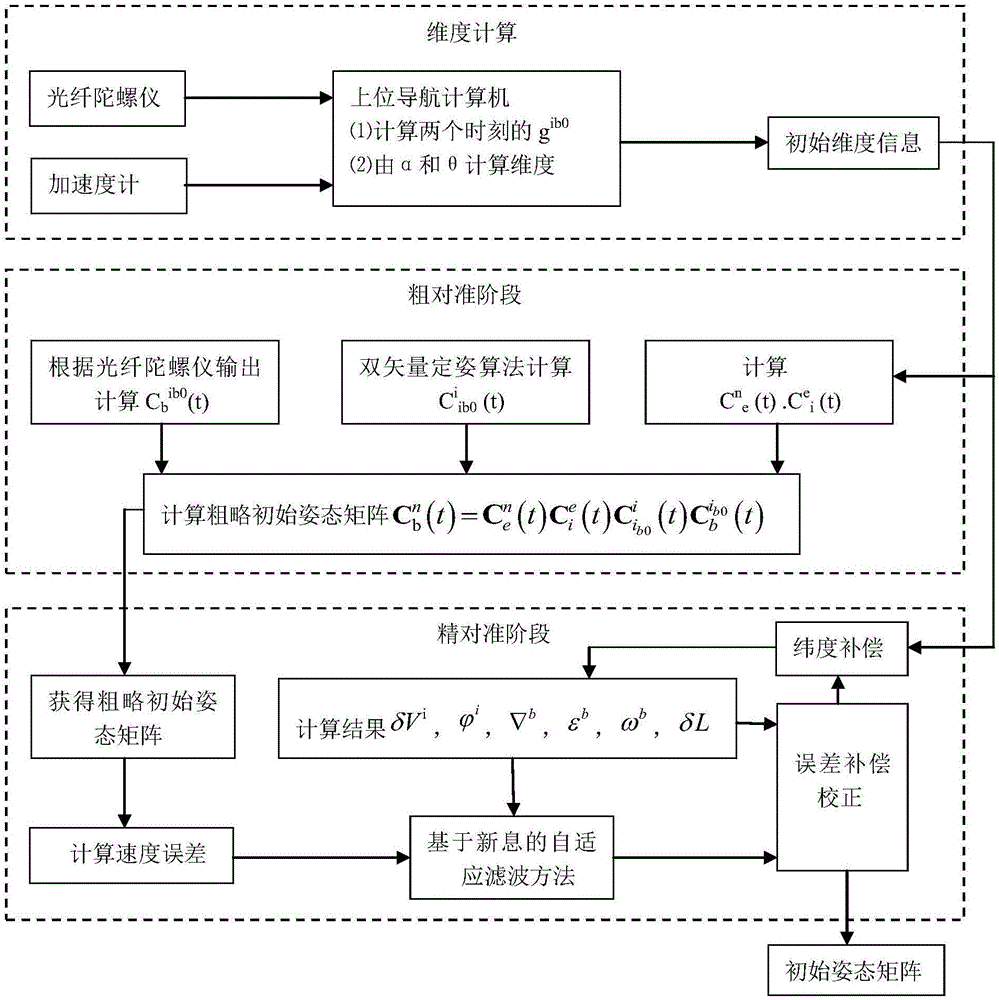
[0036] The following combined method flow figure 1 and strapdown inertial navigation system overall calculation figure 2 The specific implementation steps of the present invention are described in detail:
[0037]In the detailed description of the implementation steps below, the coordinate system is defined as follows: the earth coordinate system e system, the origin is selected from the center of the earth, the X axis is located in the equatorial plane, pointing from the center of the earth to the meridian of the point where the carrier is located, and the Z axis is along the direction of the earth's rotation axis, following the earth Rotation and rotation, X-axis, Y-axis and Z-axis constitute the right-handed coordinate system, which rotates with the rotation of the earth; the earth-centered inertial coordinate system i system is formed after the inertial solidification of the earth coordinate system e-system at the initial moment of rough alignment Coordinate system; navi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More