

A spatial six-degree-of-freedom mechanism for multi-body separation tests in hypersonic wind tunnels
A multi-body separation, hypersonic technology, used in aerodynamic testing, testing of machine/structural components, instruments, etc., can solve the problems that the six degrees of freedom are not completely independent, difficult to have high stiffness, and high motion accuracy, etc. Improved response speed and running accuracy, reduced power and volume, and the effect of a large range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
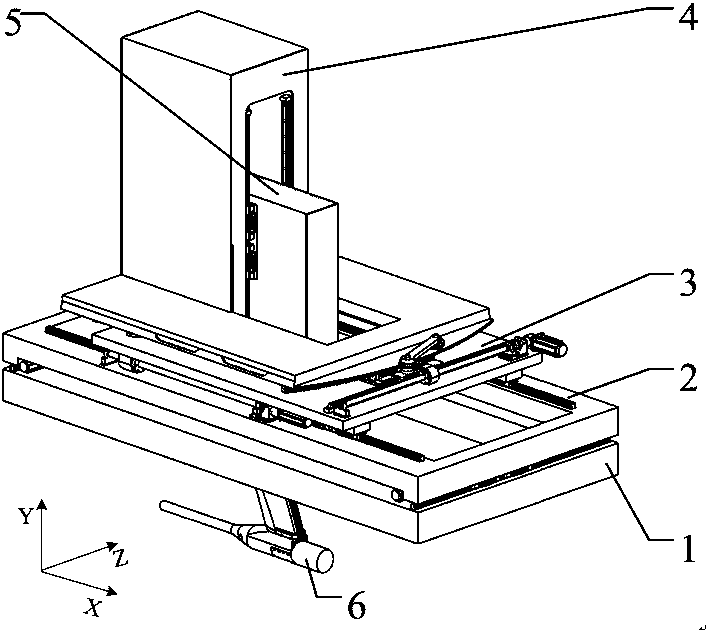
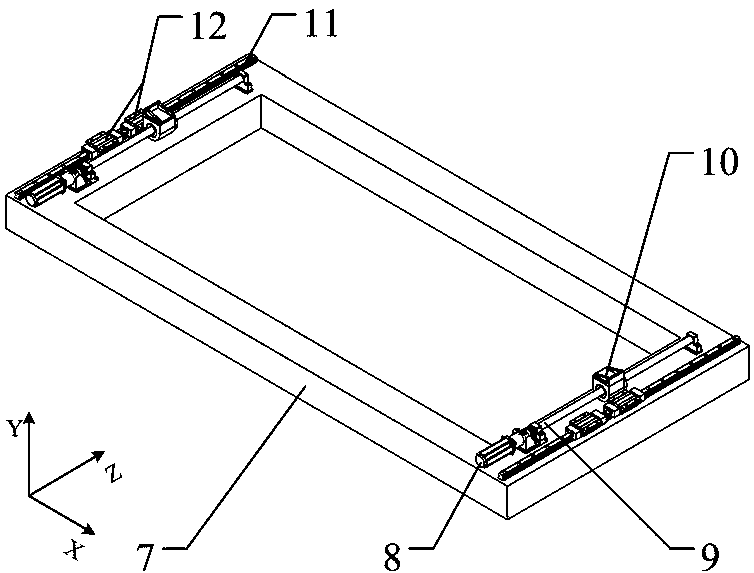
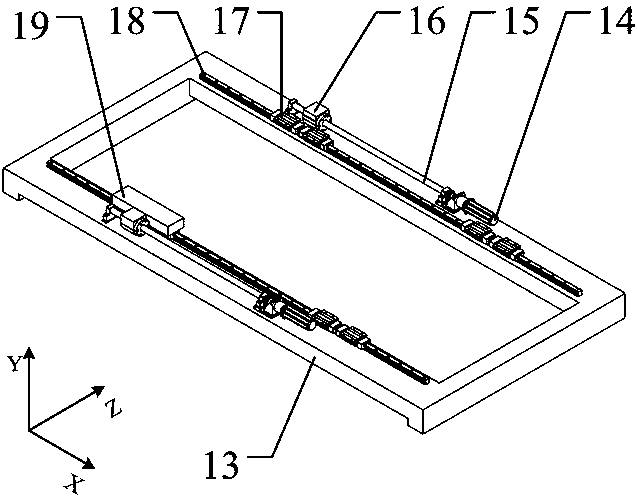
[0042] Such as figure 1 As shown, the space six-degree-of-freedom mechanism includes Z-direction mechanism 1, X-direction mechanism 2, β Mechanism 3, Y direction mechanism 4, α Agency 5 and gamma Mechanism 6, the six degrees of freedom are layered and connected step by step. In terms of structure, the embedded integration is realized by stacking boxes to ensure that the six degrees of freedom mechanisms can move independently of each other and can be linked together, and It can achieve high stiffness and large range of motion in a limited space. The first stage of the space six-degree-of-freedom mechanism is the Z-direction mechanism 1, and the Z-direction base 7 is fixed on the mounting bracket in the wind tunnel test section; the sixth stage realizes the rolling motion, and the rolling degree of freedom gamma Mechanism 6 is connected with the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More