

Integral Sliding Mode Repetitive Controller for Periodic Servo Systems
A repetitive controller and integral sliding mode technology, applied in the field of motor servo system, can solve the problems of large steady-state tracking error and poor position tracking accuracy, and achieve the effects of reducing steady-state tracking error, improving control accuracy and simplifying design work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings.
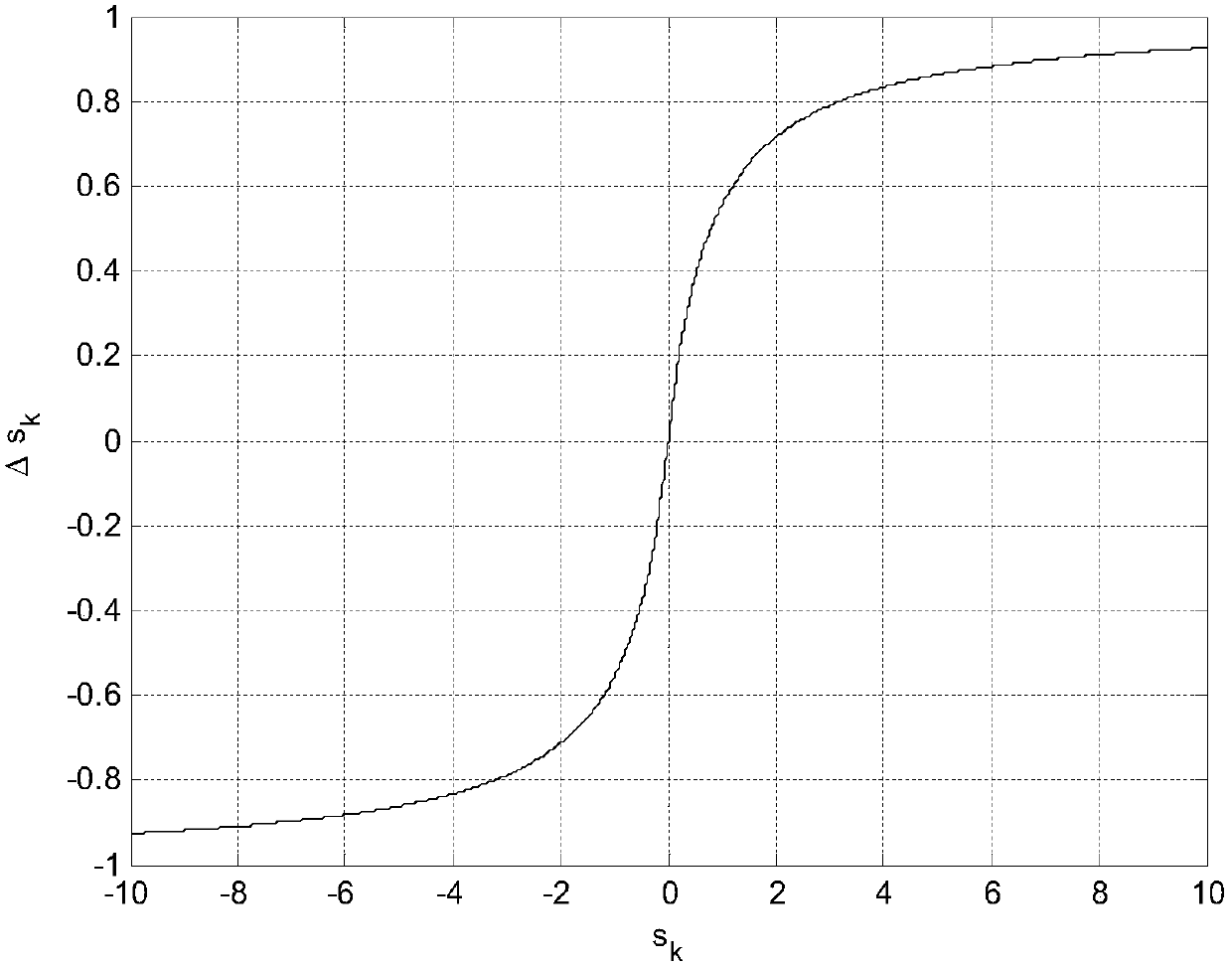
[0055] refer to Figure 1 to Figure 10 , an integral sliding mode repetitive controller suitable for periodic servo systems, according to the operating process of the system state, the sliding mode control can be divided into two stages of approaching motion and sliding mode motion. The convergence trajectory of the system state in the approaching motion is described by the approaching law. Further, in order to make the system output position converge to the neighborhood of the reference signal in a limited time, the present invention constructs a discrete approaching law
[0056]
[0057]The formulas λ, μ and ε are the positive parameters of the reaching law, satisfying that λ>ε, (1) contains linear and nonlinear parts, when |s k When | is larger, the convergence speed is fast and then slow, and the last step reaches and remains at zero. According to (1) there is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More