

Robot navigation map construction method based on rat brain hippocampus spatial cells
A construction method and navigation map technology, applied in navigation, surveying and navigation, two-dimensional position/channel control, etc., can solve problems such as low scalability, complex calculation, and limited application of Kalman filter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
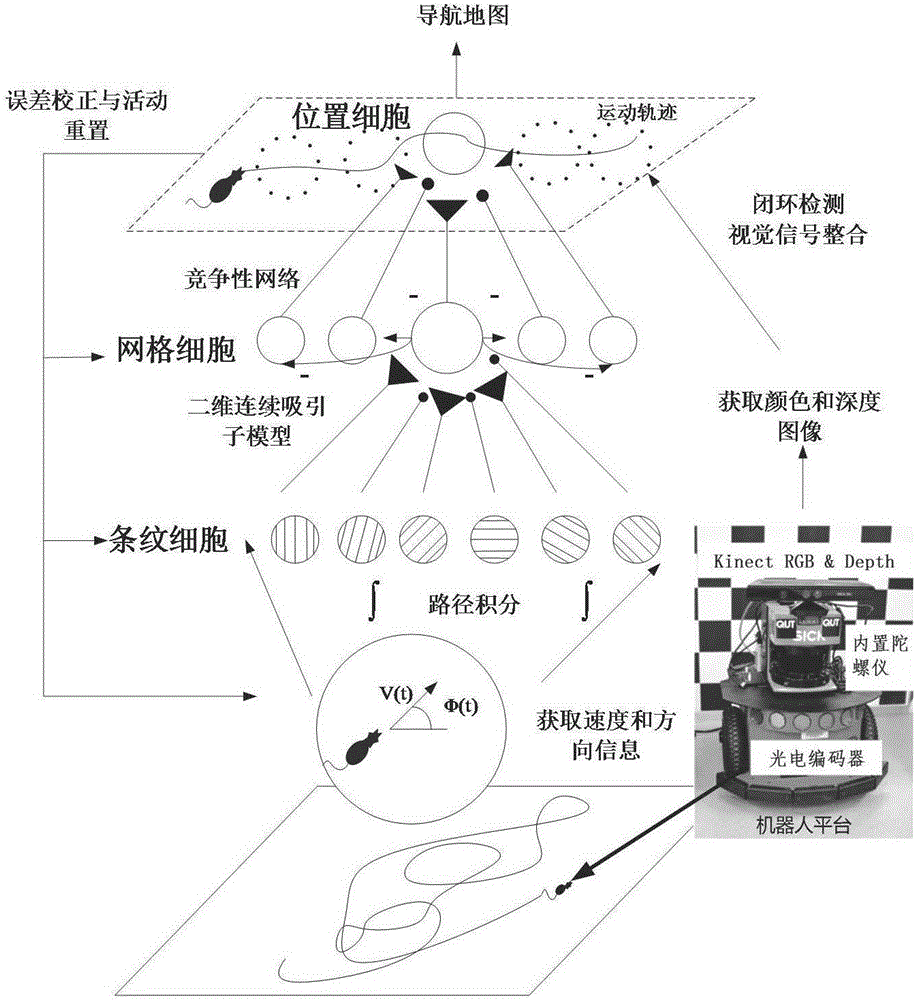
[0130] The robot navigation map construction method based on the hippocampus space cells of the mouse brain proposed by the present invention is to use a small number of sensors to obtain a universal and accurate robot navigation map in a bionic way, and solve the traditional SLAM algorithm’s high requirements for sensors and hardware and complex calculations High accuracy, limited accuracy, and poor adaptability. The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and embodiments.
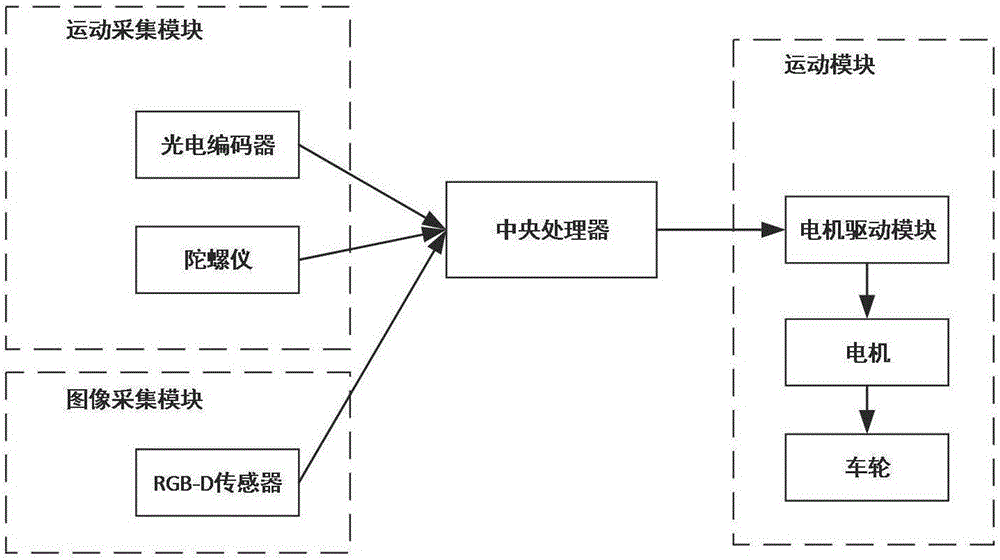
[0131] All examples use the attached Figure 8The robot shown performs map building. The mobile device is composed of two front wheels and a rear wheel. The rear wheel is a small universal wheel, which is convenient for the stable support and disguise of the robot. The front wheel is equipped with a photoelectric encoder, which can collect and record the moving speed of the robot. The built-in gyroscope can coll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More