

Online detection method for moment of artificial muscle group driven robot joint
A technology of a robot joint and a detection method, which is applied to force/torque/work measuring instruments, instruments, measuring devices, etc., can solve problems such as tension and joint torque of the traction wire of the first artificial muscle group
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with accompanying drawing of description, but protection scope of the present invention is not limited thereto:
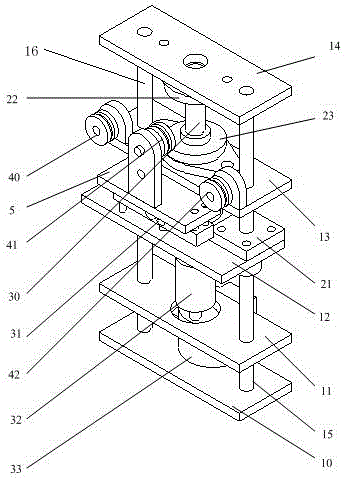
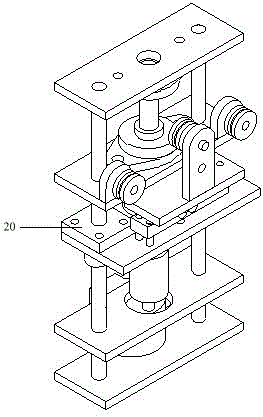
[0046] Such as Figure 1-8 As shown, the artificial muscle group-driven bionic joint torque detection device used in the present invention's artificial muscle group-driven bionic joint torque detection device, referred to as the joint torque detection device 07, is arranged between the main joint 08 and the artificial muscle group-driven bionic joint. Between the first auxiliary joint 03 and the second auxiliary joint 04, there are bottom plate 10, second fixed plate 13, first fixed plate 11 and top plate 14 connected by the first guide rail 15 and the second guide rail 16, and the moving plate 12 passes through the second The linear bearing with seat 20 and the second linear bearing with seat 21 are connected to the two guide rails, the screw nut 31 is fixedly connected to the moving plate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More