

Robot tracking method and equipment for robot tracking
A robot and equipment technology, applied in the field of robotics, can solve the problems of tracking lost targets, single target object collection method, easy to track wrong targets, etc., and achieve the effect of reducing the probability of tracking lost targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The application will be described in further detail below in conjunction with the accompanying drawings.
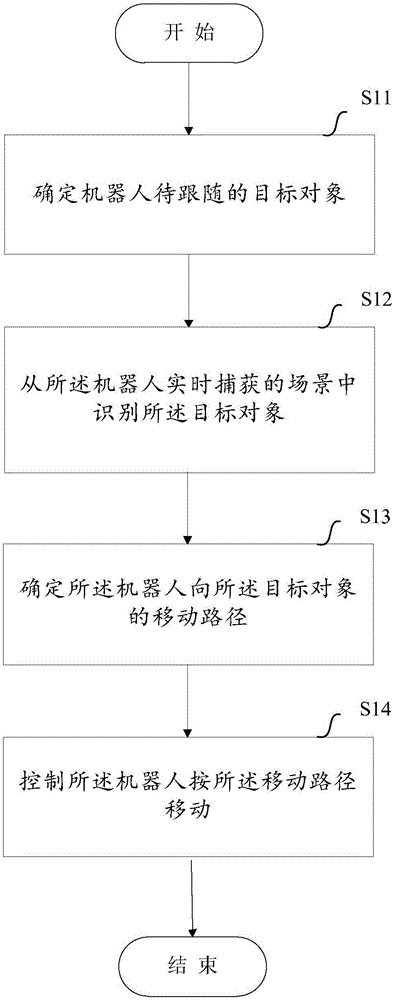
[0030] figure 1 A flow chart of a method for a robot following a target object is shown according to one aspect of the present application. Wherein, the method includes step S11, step S12, step S13 and step S14.
[0031] Wherein, in step S11, the target object to be followed by the robot is determined; here, firstly, the scanning device scans the environment information around the robot, wherein the scanning device includes but not limited to laser sensors, cameras, depth cameras, etc., and various devices can Install on one or more parts of the robot as needed. The result of scanning is the raw data of environmental information, which can be images, pictures or point clouds. Then, the object type to be followed is detected from the environment information, and there may be one or more objects belonging to the object type in the environment. Among them, the class...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More