

Six-freedom-degree manipulator driven by two motors
A dual-motor drive, degree of freedom technology, applied in manipulators, program-controlled manipulators, joints, etc., can solve problems such as high pressure requirements, shortened service life of gears, and failure to eliminate backlash
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
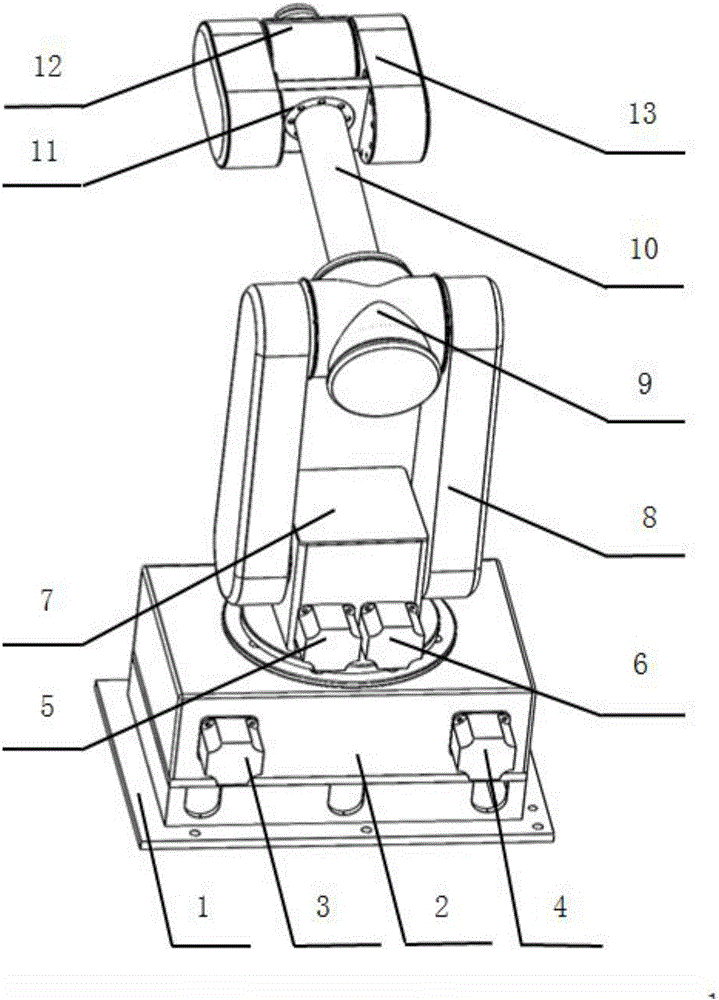
[0026] Such as Figure 1 to Figure 7 As shown, a dual-motor-driven six-degree-of-freedom manipulator belongs to industrial robots and is used in modern industrial production to replace manual production operations.
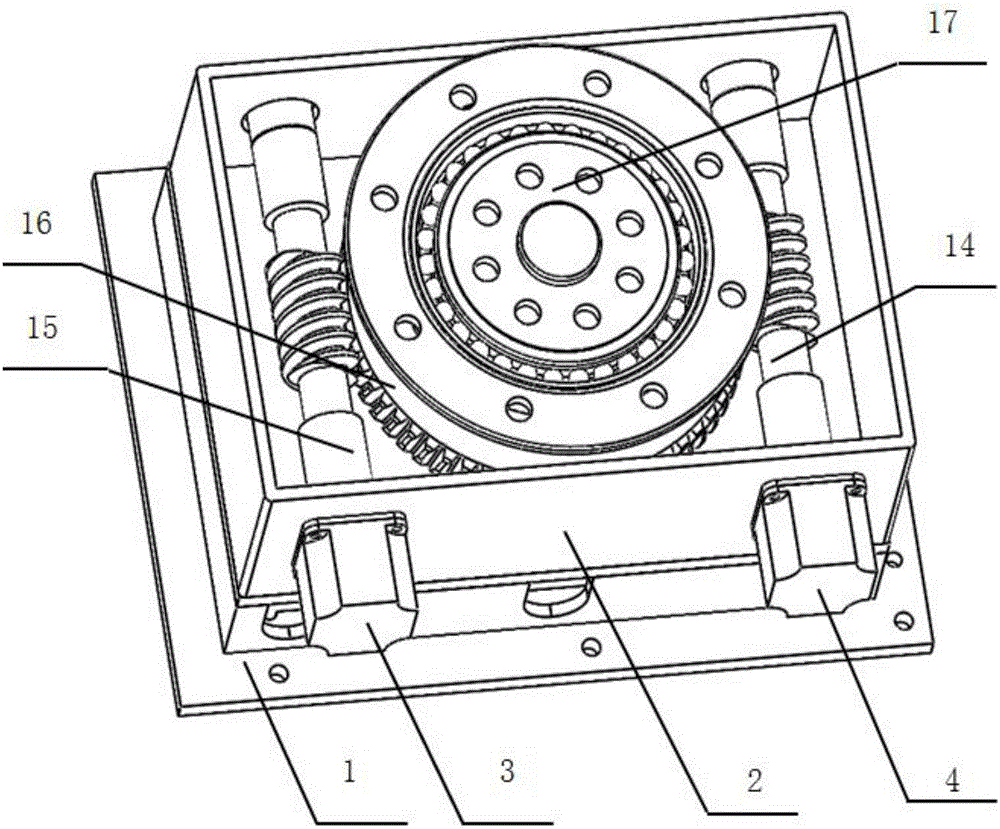
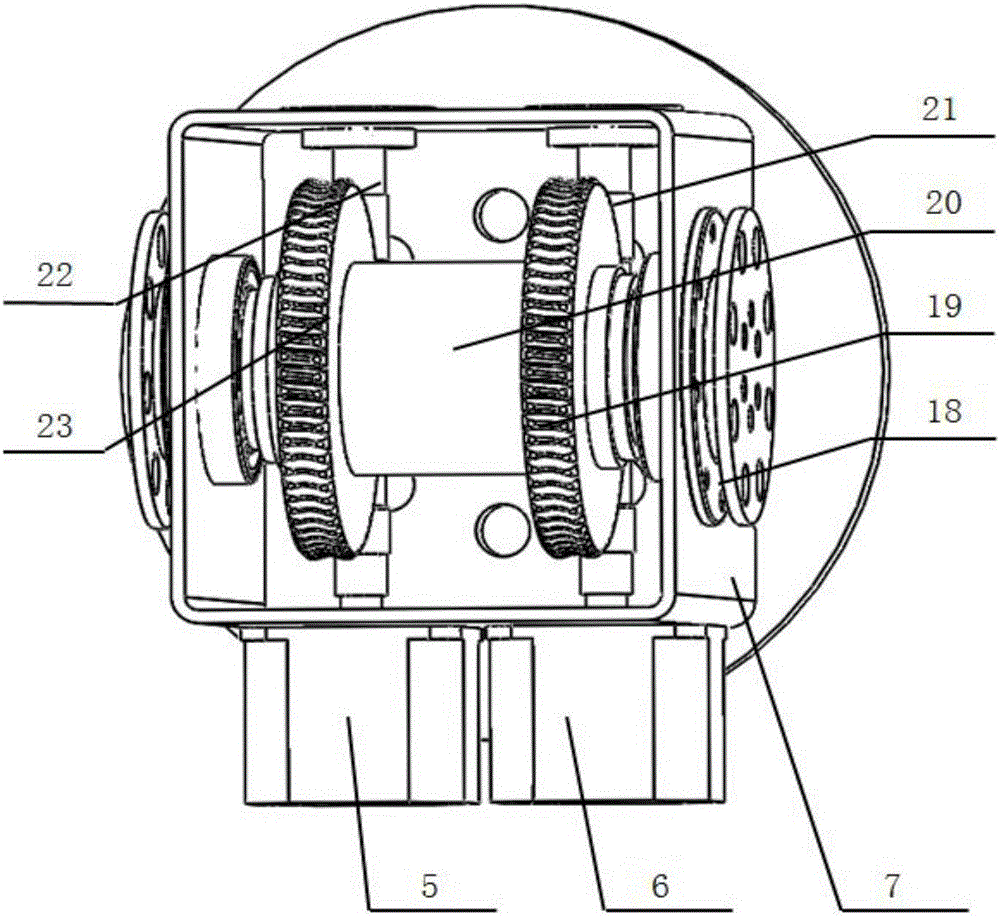
[0027] Such as figure 1 As shown, the six-degree-of-freedom manipulator driven by dual motors of the present invention includes a base bracket 1, on which a base box 2 is fixed, and the base box 2 is connected to the shoulder joint box 7, and the shoulder joint box 7 passes through the arm 8 is connected to the elbow joint box 9, and the elbow joint box 9 is connected to the wrist joint through the forearm 10, wherein the big arm 8 and its internal structure are arranged symmetrically with respect to the elbow joint box 9, and the wrist joint side arm 13 and its internal structure are about The wrist joint box 12 is arr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More