

Modeling and self-adaptive control method for four-axis aircraft carrying uncertain loads
A quadcopter, self-adaptive control technology, applied in attitude control, non-electric variable control, control/regulation systems, etc., can solve the problems of uncertain controller design, uncertain mathematical model of aircraft, and inability to quickly converge control effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
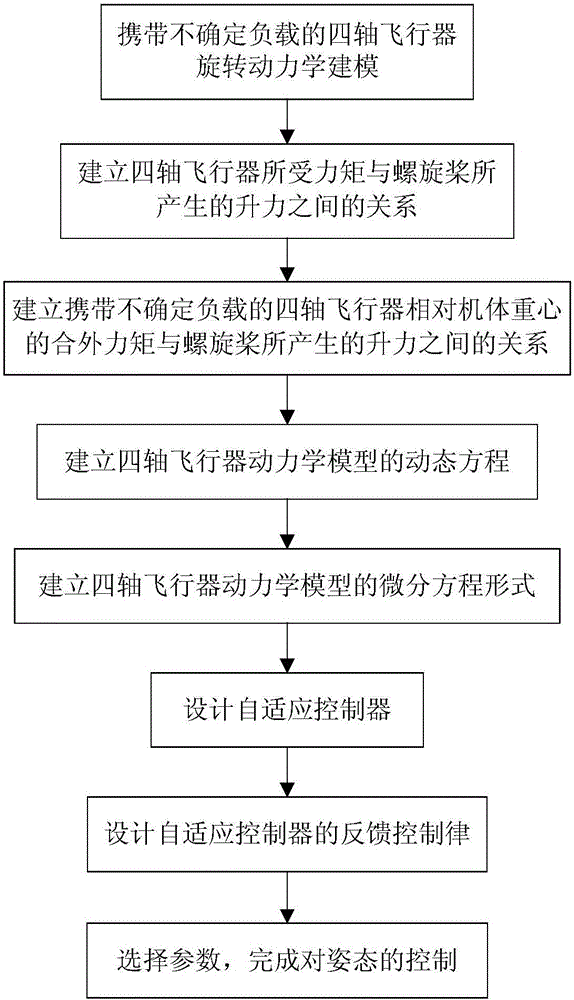
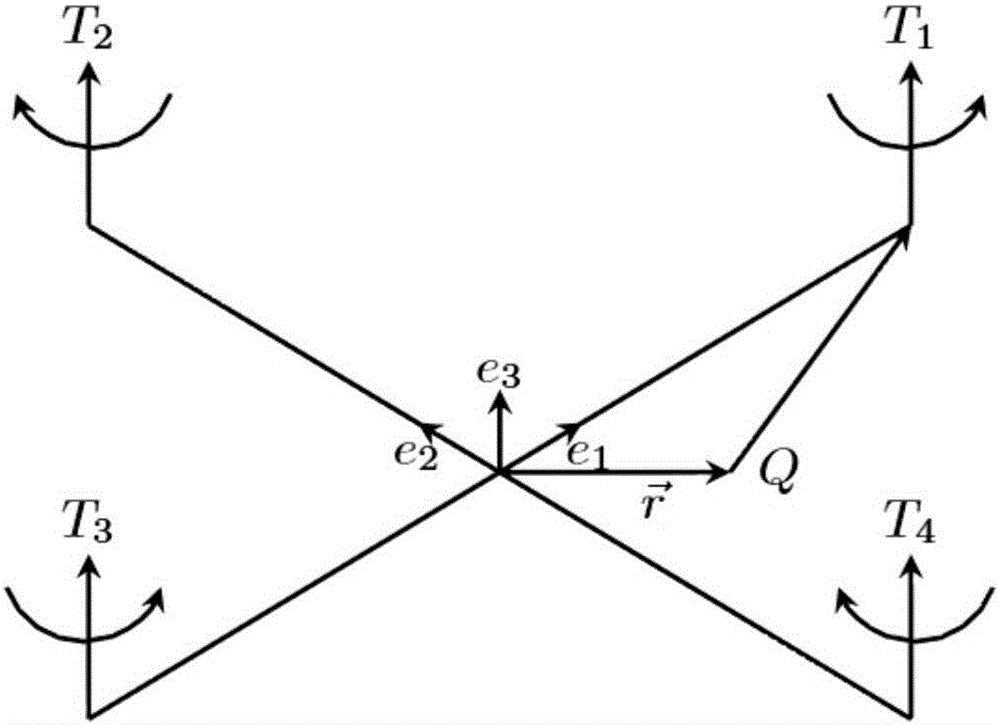
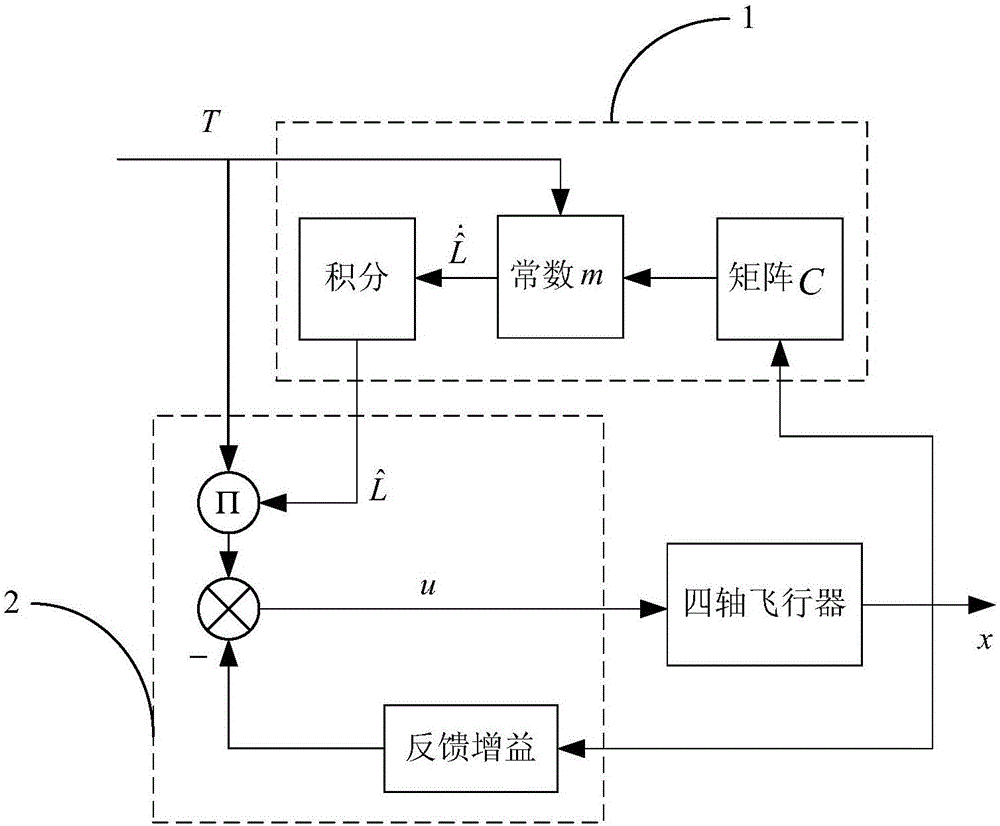
[0069] A modeling and adaptive control method for a quadcopter carrying an uncertain load. Firstly, the precise dynamics modeling is carried out for the quadcopter carrying an uncertain load, and the differential equation form of the dynamic model is obtained. Then, based on the The dynamic model is used to design the adaptive controller, and finally design the feedback control law to select the appropriate parameters to control the quadcopter. The present embodiment is the method for four-axis aircraft, both can be used on four-rotor four-axis aircraft (that is, four-axis aircraft provided with four propellers), also can be used on eight-rotor four-axis aircraft, eight-ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More