

Sensor-free charging control method of magnetic levitation energy storage flywheel
A charging control method, energy storage flywheel technology, applied in motor generator control, electronic commutation motor control, control system and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
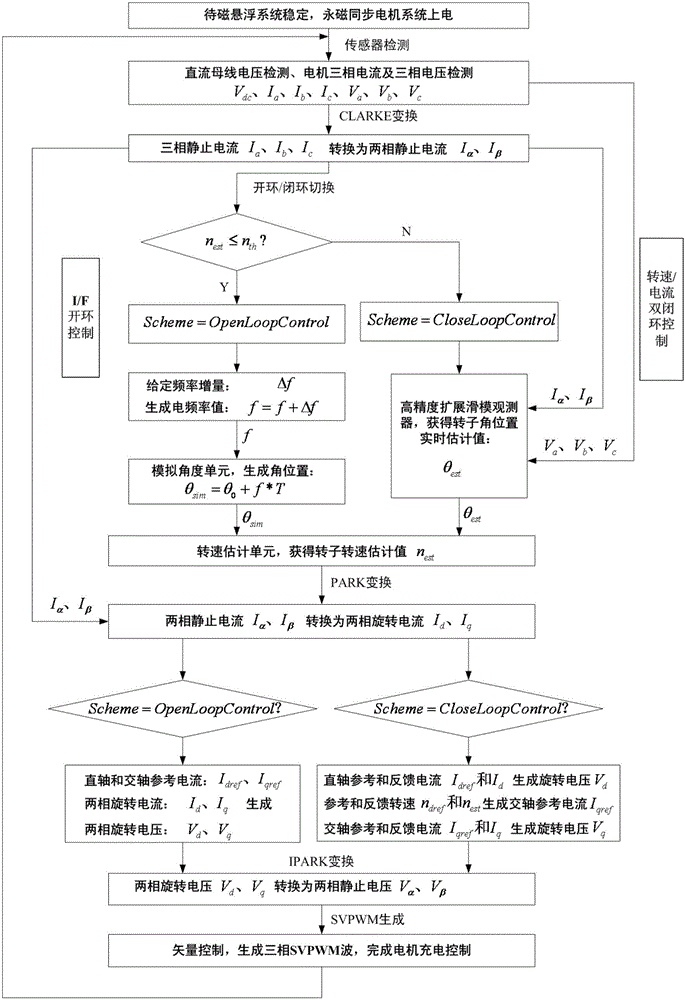
[0026] A sensorless charging control method for a magnetic levitation energy storage flywheel. The control method includes ten steps. The first step is to control the stable operation of the magnetic levitation system, and then the permanent magnet synchronous motor used to drive the flywheel to rotate is powered on; the second step is installed at the input end of the motor. The Hall current sensor respectively measures the three-phase current I of the motor a , I b , I c , the voltage sensor measures the motor three-phase voltage V a , V b , V c and DC bus voltage Vdc ; In the third step, the three-phase quiescent current I obtained in the second step a , I b , I c Input to the three-phase static to two-phase static conversion CLARKE module to generate a two-phase static current I α , I β ; The fourth step is based on the speed estimation value θ est with the set threshold θ th The relationship between open-loop and closed-loop control switching; the fifth step is ...
Embodiment 2
[0028] A sensorless charging control method for a magnetic levitation energy storage flywheel described in Embodiment 1, the fourth step is based on the estimated rotational speed θ est with the set threshold θ th The relationship between open-loop and closed-loop control switching is when θ est ≤θ th , adopt constant current frequency ratio I / F open-loop control and set the variable Scheme=OpenLoopControl; when θ est th , using speed / current double closed-loop control and setting variable Scheme=CloseLoopControl; where OpenLoopControl=0, CloseLoopControl=1.
Embodiment 3
[0030] In the sensorless charging control method of a magnetic levitation energy storage flywheel described in Embodiment 1, the fifth step of obtaining the angular position of the rotor is if Scheme=OpenLoopControl, then a frequency increment Δf is given to generate an electric frequency value f=f+ Δf, input to the analog angle unit to generate the angular position θ=θo+f*T, where θo is the initial angular position, and T is the sampling period; if Scheme=CloseLoopControl, the Va, Vb, Vc obtained in the second step and the third I α , I β Input to the high-precision extended sliding mode observer to obtain the estimated rotor angular position θ est .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More