

Main operation platform for minimally invasive surgery robot
A technology of minimally invasive surgery and robotics, which is applied in the direction of surgical robots, can solve problems such as poor structural rigidity and small range of motion, and achieve the effects of reducing structural complexity, reducing motion inertia, and improving operability comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below in conjunction with specific embodiments.
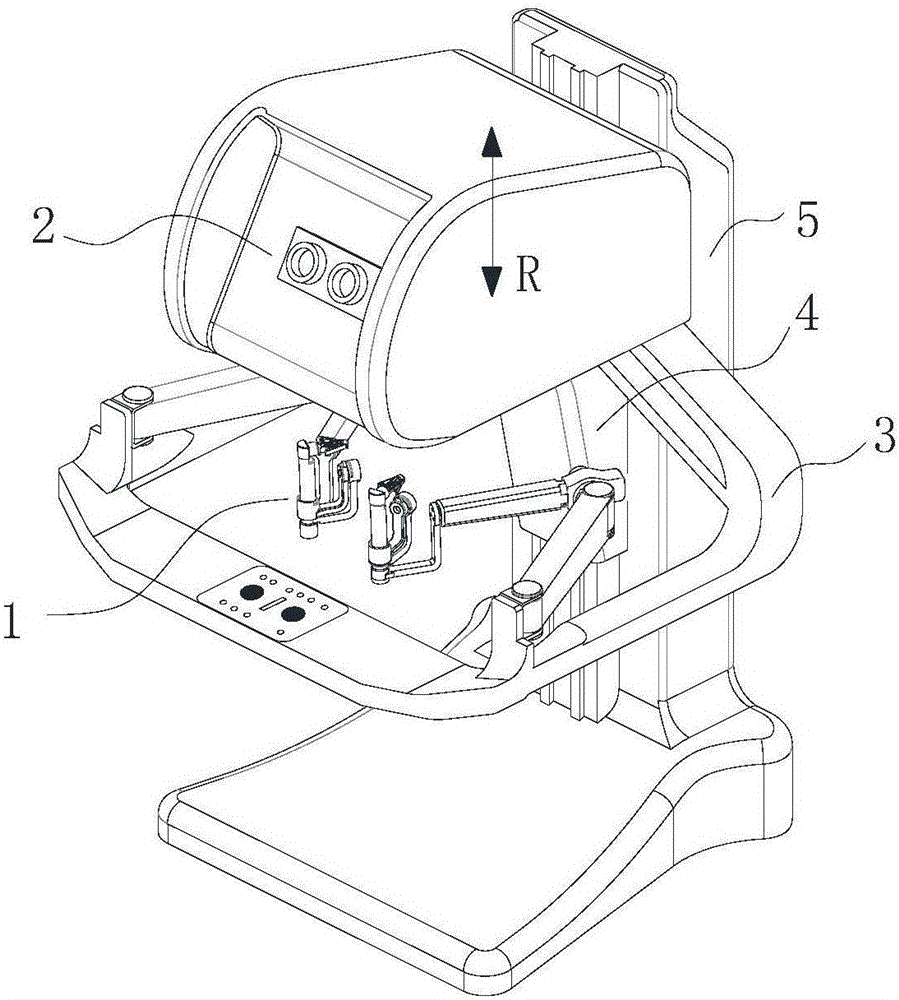
[0033] As shown in the figure, a main operating platform for a minimally invasive surgical robot includes a base 5, on which a lifting platform 4 is vertically connected through a screw screw pair, so that the lifting platform 4 is relatively close to the base. The lifting movement of the seat 5, the image display system 2 and the support ring arm 3 are respectively fixedly installed on the upper side of the lifting platform 4, and the left and right main operating hands 1 are symmetrically fixed on the left and right sides of the front end of the support ring arm 3 respectively. On the stage, the doctor controls the movement of the robotic arm by manipulating the main manipulator 1 . The integral movement of the image display system 2 with the lifting platform 4 realizes its own lifting degree of freedom R, and the specific imaging principle and structure of the image di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More