

High performance robot crashproof mobile algorithm
A robot, high-performance technology, applied in the direction of instruments, non-electric variable control, electric speed/acceleration control, etc., can solve problems such as low efficiency, and achieve the effect of improving mobile efficiency and strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the drawings and embodiments, and the embodiments of the present disclosure are not necessarily intended to cover all aspects of the present invention.
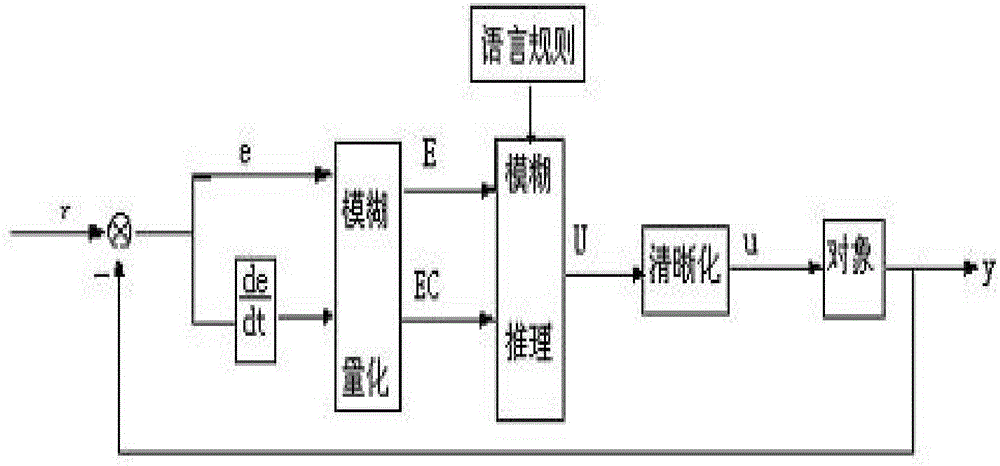
[0022] figure 1 It is the schematic diagram of the fuzzy PID structure. The so-called fuzzy PID controller is to use fuzzy logic algorithm and according to certain fuzzy rules to optimize the proportion, integral and differential coefficients of PID control in real time, so as to achieve a more ideal control effect. Fuzzy PID control includes several important components such as parameter fuzzification, fuzzy rule reasoning, parameter defuzzification, and PID controller. The computer calculates the deviation e between the actual position and the theoretical position and the current deviation change ec according to the set input and feedback signals, and performs fuzzy reasoning according to the fuzzy rules, and finally defuzzifies the fuzzy para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More