

Flyback LED drive circuit based on BP neural network PI control method
A BP neural network, LED driving technology, applied in the field of LED driving circuit and switching power supply, can solve the problems of low stability, low adaptability, poor adaptability of operating circuit, etc. adaptive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
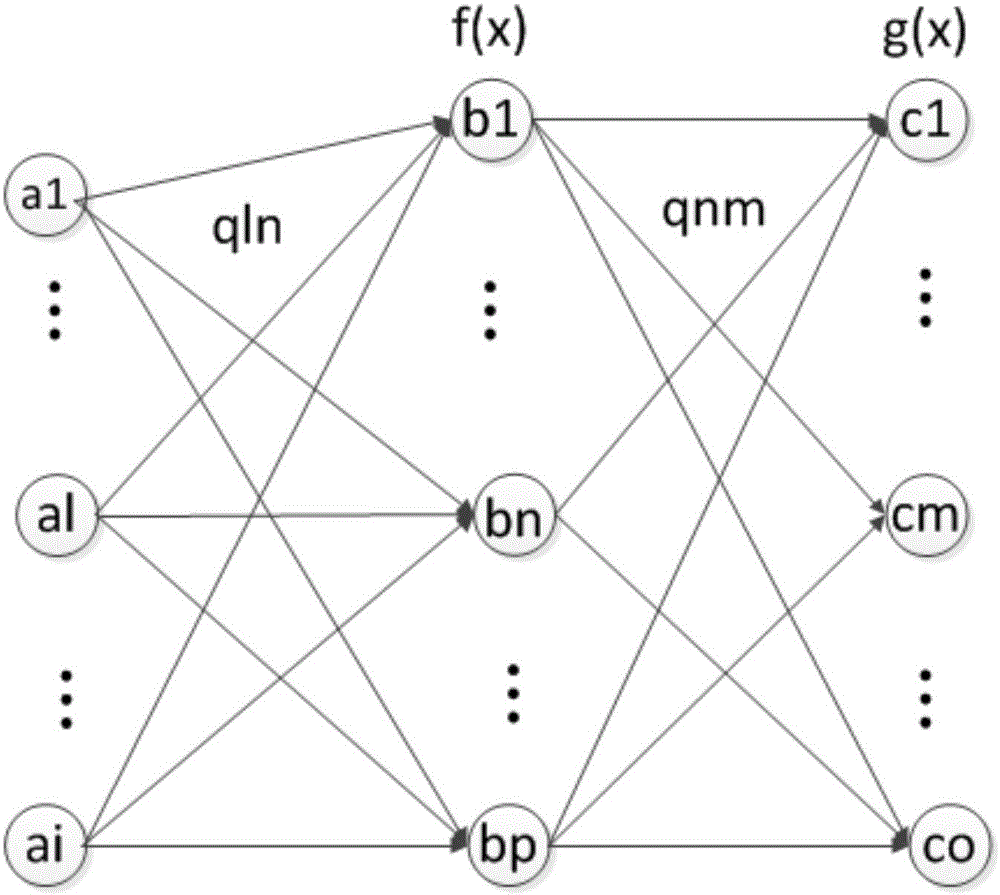
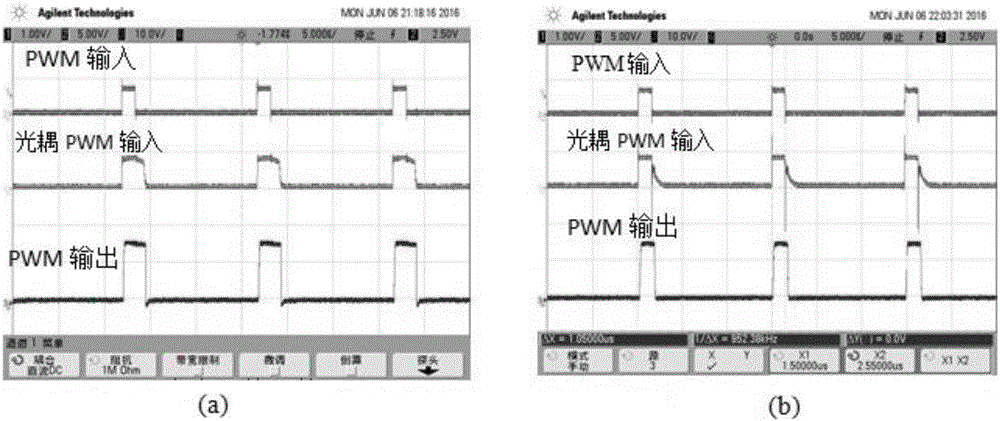
[0046] Take the input AC 220V, the LED load is 20 1W white LED particles connected in series, and the output current r(k) is set to 0.18A. The BP neural network PI control method takes 1 as the number i of input layer nodes, 5 as the number p of hidden layer nodes, and 2 as the number of output layer nodes, corresponding to the P parameter and I parameter in the PI parameters respectively, such as image 3 As shown, the time for the flyback LED drive circuit based on the BP neural network PI control method to output the set current value stably is about 0.01s, and the time for the flyback LED drive circuit with the ordinary PI control method to output the set current value stably is 0.016 s.
[0047] Through this example, the flyback LED drive circuit based on the BP neural network PI control method can be made with a response speed higher than that of the common PI control method.
Embodiment 2
[0049] Take the input AC 220V, the LED load is 20 1W white LED particles connected in series, and the output current r(k) is set to 0.35A. The BP neural network PI control method takes 1 as the number i of input layer nodes, 5 as the number p of hidden layer nodes, and 2 as the number of output layer nodes, corresponding to the P parameter and I parameter in the PI parameters respectively. like Figure 4 The measured output time of the flyback LED drive circuit based on the BP neural network PI control method is 0.016s, and the output time of the flyback LED drive circuit of the ordinary PI control method is 0.025s.
[0050] Through this example, the flyback LED drive circuit based on the BP neural network PI control method can be made with an adaptability higher than that of the common PI control method.
[0051] Thus, the production of the flyback LED drive circuit based on the BP neural network PI control method is completed. The performance of the flyback LED drive circu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More