

A real-time slam method based on visual measurement
A visual measurement and incremental technology, applied in measurement devices, photogrammetry/video measurement, surveying and navigation, etc., can solve the problems of large camera offset, poor camera tracking performance, lack of 3D deep-level information, etc. Improve processing speed, good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings.
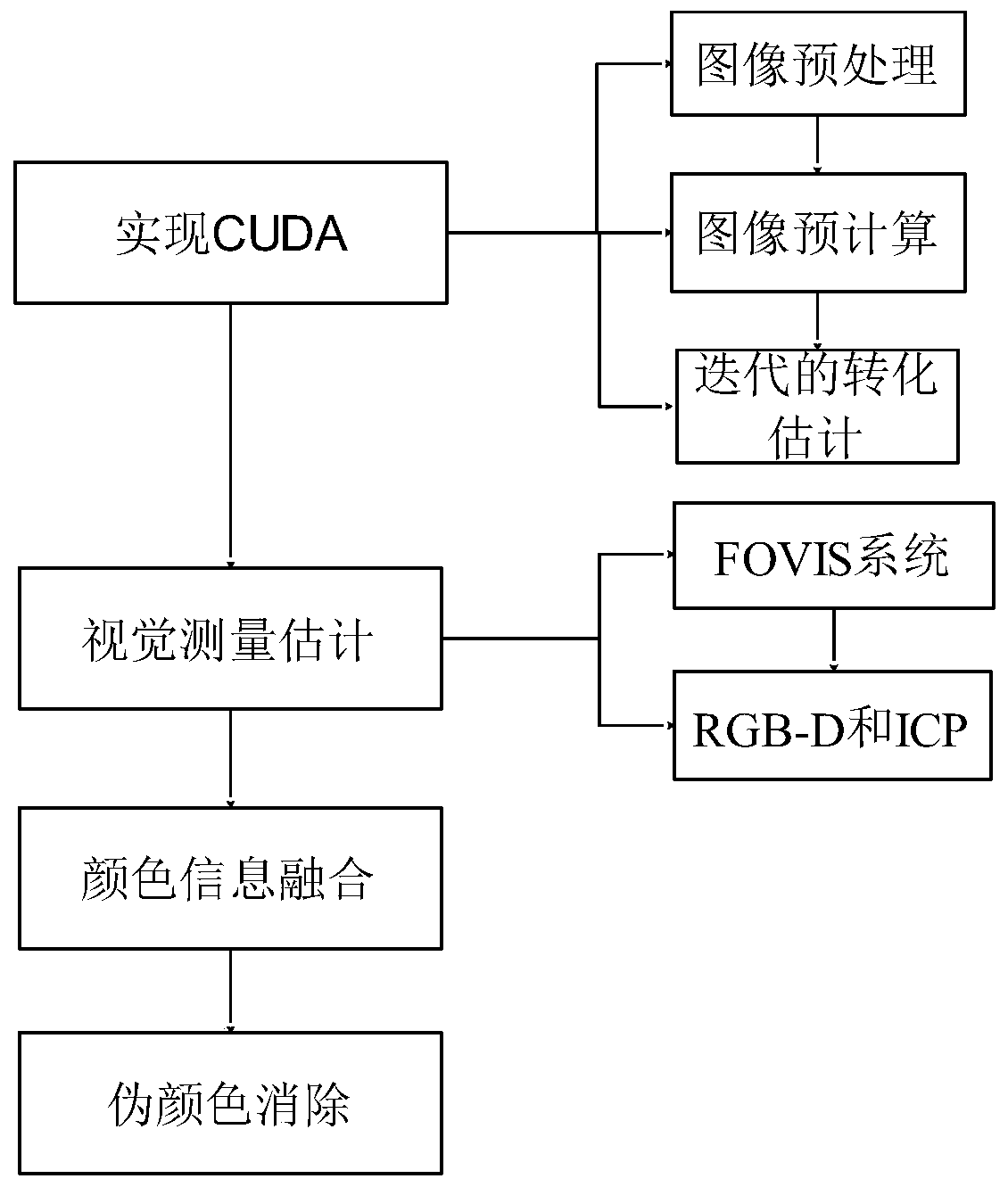
[0022] A kind of real-time SLAM method based on visual measurement, this method comprises the following steps: as shown in accompanying drawing 1,
[0023] Step 1: Implement CUDA: CUDA is a parallel computing framework for solving camera transformations. CUDA needs to pair two consecutive RGB depth maps given and To calculate the camera transformation that can maximize the consistency between the two pairs, the present invention selects a four-level pyramid mode to iteratively solve the camera transformation.
[0024] Step 1.1: Image preprocessing: On the GPU, preprocess the given sequence of RGB images and depth images to obtain continuous RGB depth image pairs; the calculation process of RGB depth image pairs is: for each depth image , first convert the original sensor value into a metric depth map M, because in CUDA applications, only the grayscale value of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More