

Control system for palletizing robot and realization method of control system
A palletizing robot and control system technology, applied in the field of palletizing robot control systems, can solve the problems of danger, uneven levels, and inability to guarantee the correctness of the programming language of the palletizing robot, so as to ensure safety and reliability, reduce Difficult to use, fast and effective palletizing work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples cited are only used to explain the present invention, and are not used to limit the scope of the present invention.
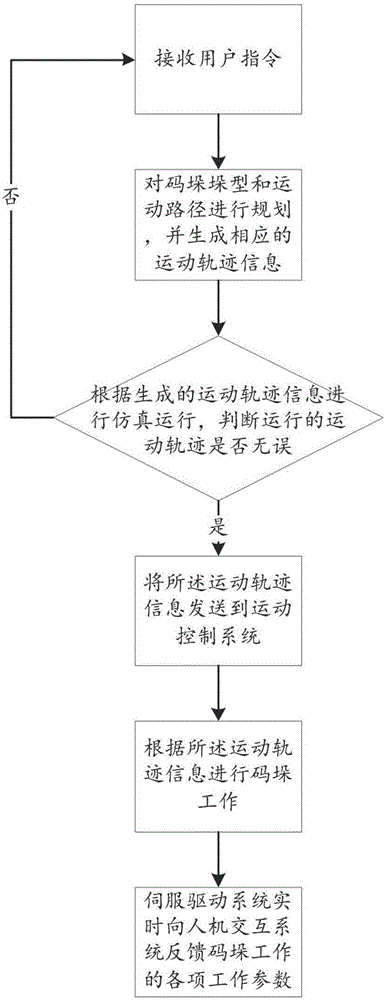
[0026] Such as figure 1 As shown, an implementation method of a palletizing robot control system includes the following steps:
[0027] Step 1. The human-computer interaction system plans the palletizing type and movement path according to the received user instructions, and generates corresponding movement track information;
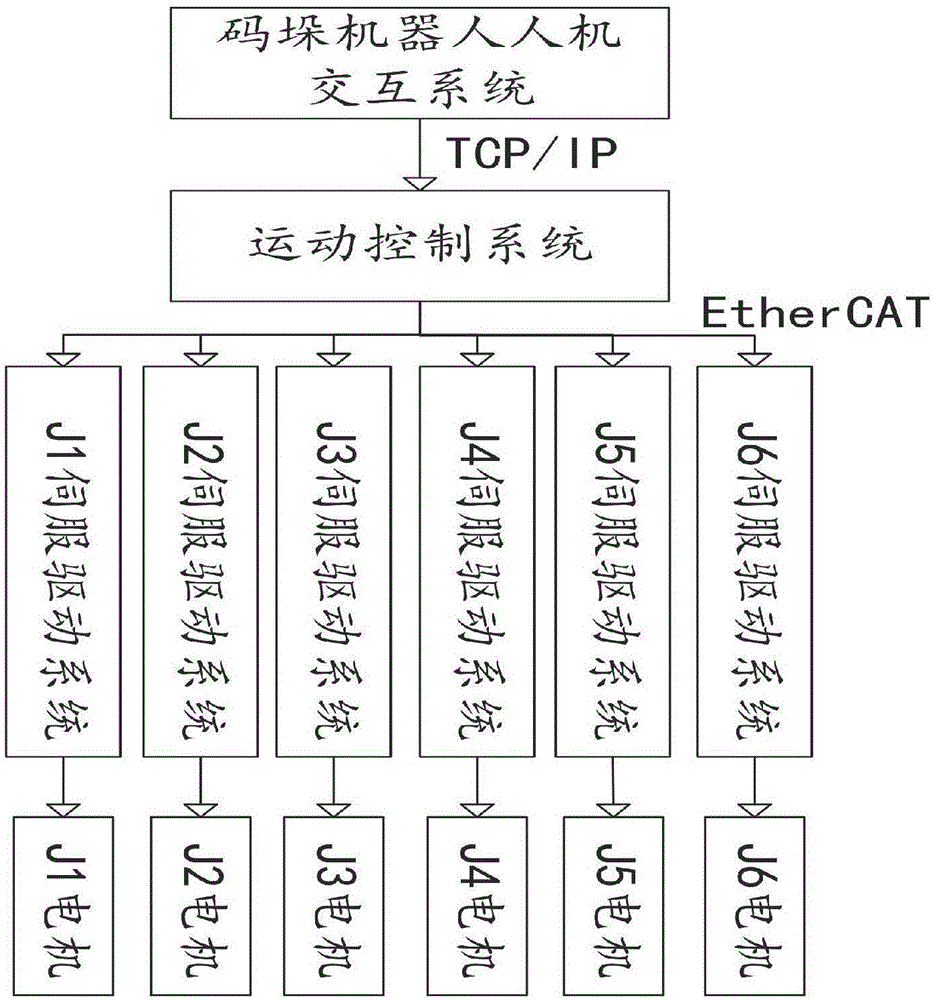
[0028] Step 2. The human-computer interaction system performs simulation operation according to the generated motion trajectory information, and judges whether the running motion trajectory is correct, and if yes, sends the motion trajectory information to the motion control system, otherwise it returns to the previous step;
[0029] Step 3. The motion control system receives the motion trajectory informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More