

Crane anti-swinging control method based on positive and negative POSICAST input reshaping method
A technology of input shaping and control methods, applied in the direction of transportation and packaging, load hanging components, etc., can solve problems such as physical discomfort of crane drivers and increased workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
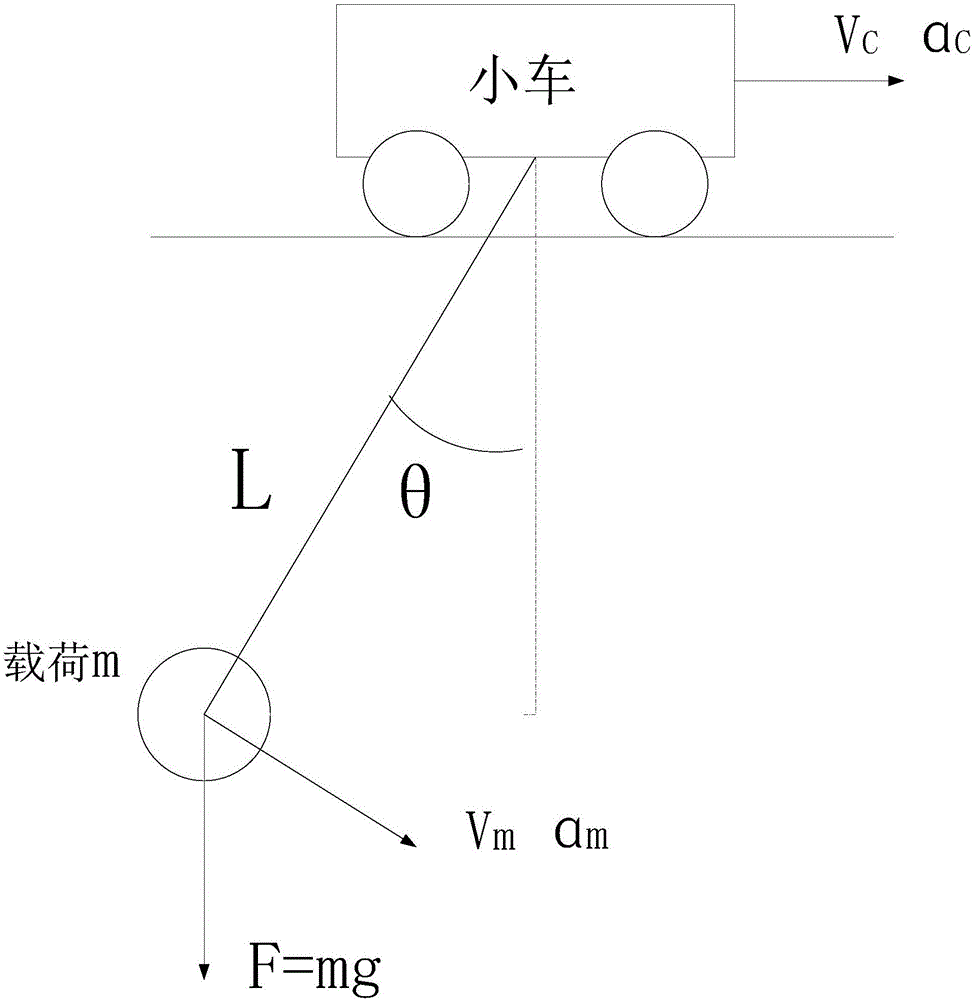
[0098] The container crane equipment has the quay bridge, the trolley of the yard bridge, the connected wire rope and the load, and the whole system can be approximated as a mobile single pendulum system, such as figure 1 shown.
[0099] The whole system controls the acceleration a of the car c , and then adjust the running speed V of the trolley c , so that the swing angle of the load is controlled to achieve the purpose of anti-sway. Among them, the mass of the load is m, the length of the sling is L, and the load is connected to the trolley through the sling. The tangential acceleration when the load is swinging is a m , the tangential velocity is V m . For convenience of analysis, the present invention makes the above assumptions to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More