

Following type driving speed reducer
A follow-up, reducer technology, applied in mechanical equipment, transmission devices, differential transmission devices, etc., can solve the problems of low machining accuracy of transmission parts, unstable transmission, poor stability, etc., to eliminate design defects, transmission Smooth and reliable effect with low mechanical wear rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
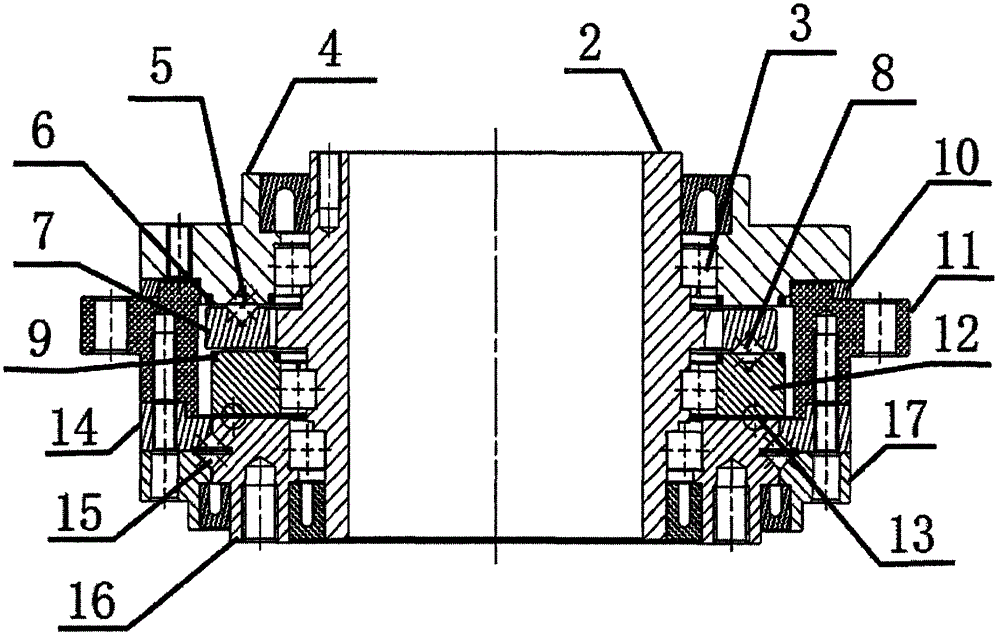
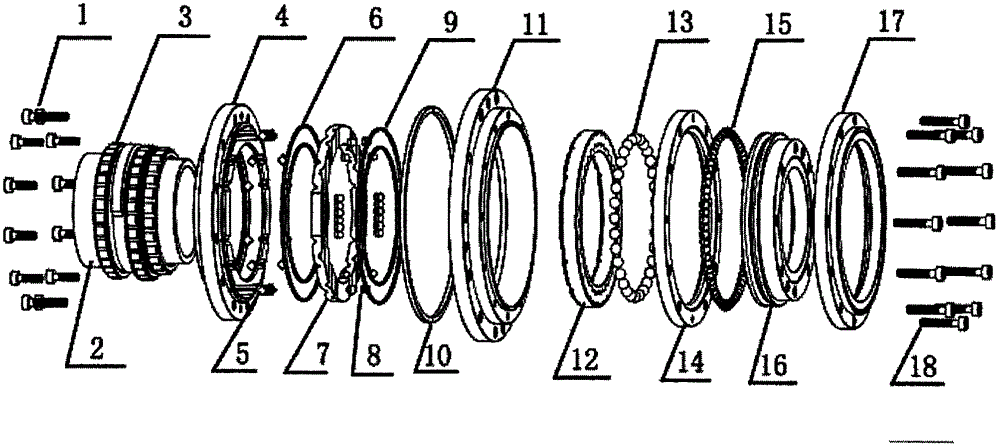
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
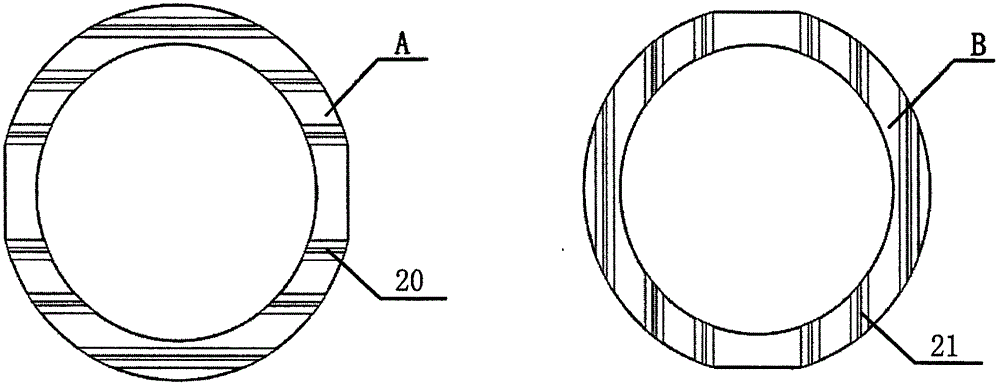
[0017] see Figure 1 to Figure 6 , the present invention is applied to a follow-up drive reducer for joint robots, including an input shaft 2, an output shaft 16, a body shell 11, a rear pressure plate 4, a differential transmission 12, a bearing upper cover 14, and a bearing lower cover 17. A follower plate 7 is installed between the differential transmission 12 and the rear pressure plate 4, and the A surface of the follower plate 7 is provided with an A surface V-shaped track 20 (multiple parallel, also known as A surface V-shaped grooves). There are first cross rollers 5 (several), and its B surface is provided with B surface V-shaped tracks 21 (multiple parallel, also known as B surface V-shaped grooves) equipped with second cross rollers 8 (several ); the rear platen 4 is provided with a transmission track 22 for installing the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More